18. Modalità Remota Robot
18.1. Panoramica
Per consentire al PLC di controllare il movimento del robot tramite diversi protocolli bus industriali (CC-Link, Profinet, Ethernet/IP ed EtherCAT), al mini armadio di controllo integrato vengono aggiunte le schede FRH-PCIeN-EC/EIP/CC/PN-RJ-V10 e FRJ-PCIeN-EIP/CC/PN-RJ-V10, realizzando le seguenti funzioni:
Supporto protocollo slave CC-Link;
Supporto protocollo slave Profinet;
Supporto protocollo slave Ethernet/IP;
Supporto protocollo slave EtherCAT (non supportato dalla scheda FRJ-PCIeN-EIP/CC/PN-RJ-V10).
18.2. Configurazione Ambiente
18.2.1. Installazione Scheda
Verifica materiali: Le schede FRH-PCIeN, FRJ-PCIeN e le relative parti in lamiera sono mostrate di seguito.
Figura 18.2-1 Lamiera di Montaggio (Frontale)

Figura 18.2-2 Lamiera di Montaggio (Retro)

Figura 18.2-3 Scheda FRH-PCIeN-EC/EIP/CC/PN-RJ-V10

Figura 18.2-4 Scheda FRJ-PCIeN-EIP/CC/PN-RJ-V10
Installare la scheda nel mini armadio di controllo integrato come mostrato.

Figura 18.2-5 Diagramma Installazione Lamiera
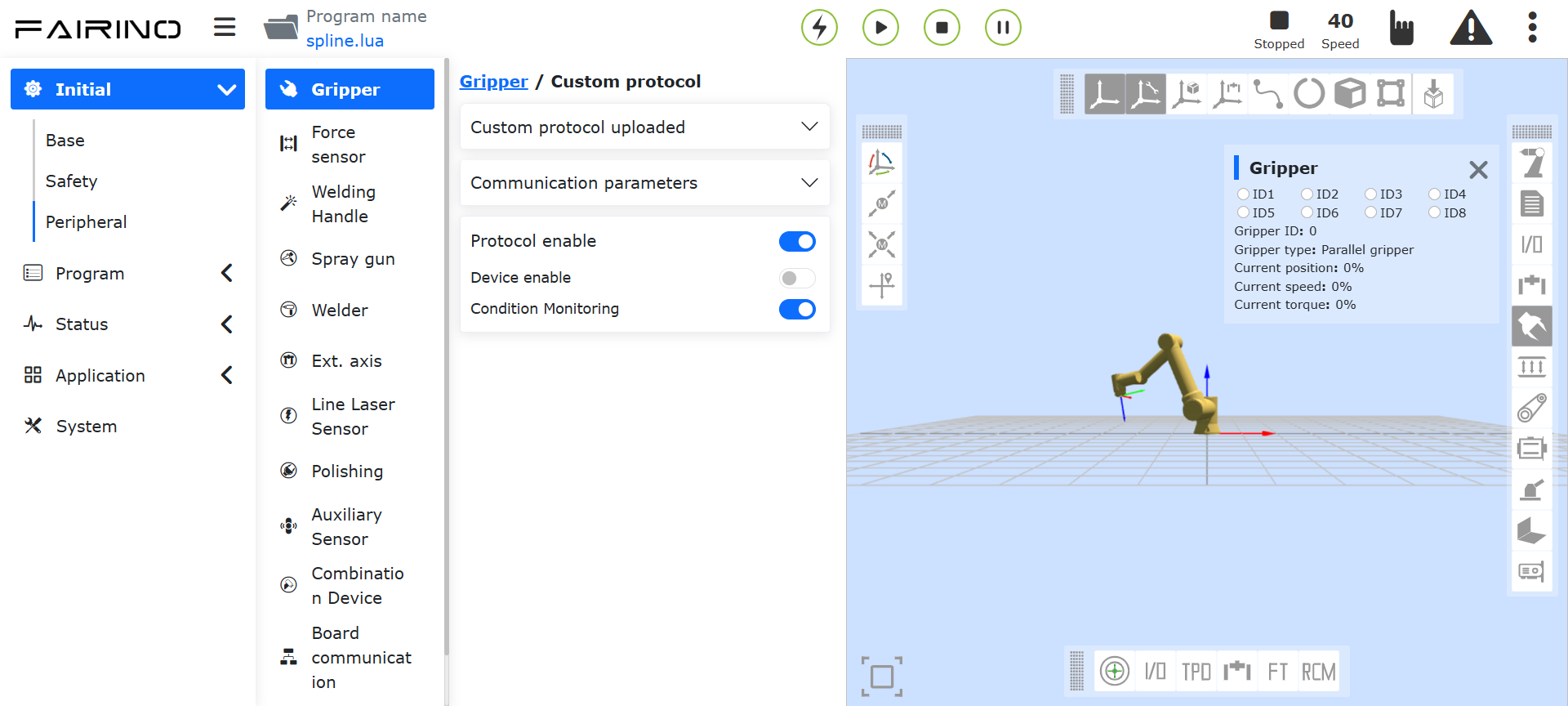
Figura 18.2-6 Diagramma Installazione Scheda Principale FRH-PCIeN

Figura 18.2-7 Diagramma Installazione Scheda di Espansione Porta di Rete (RJ45) FRH-PCIeN
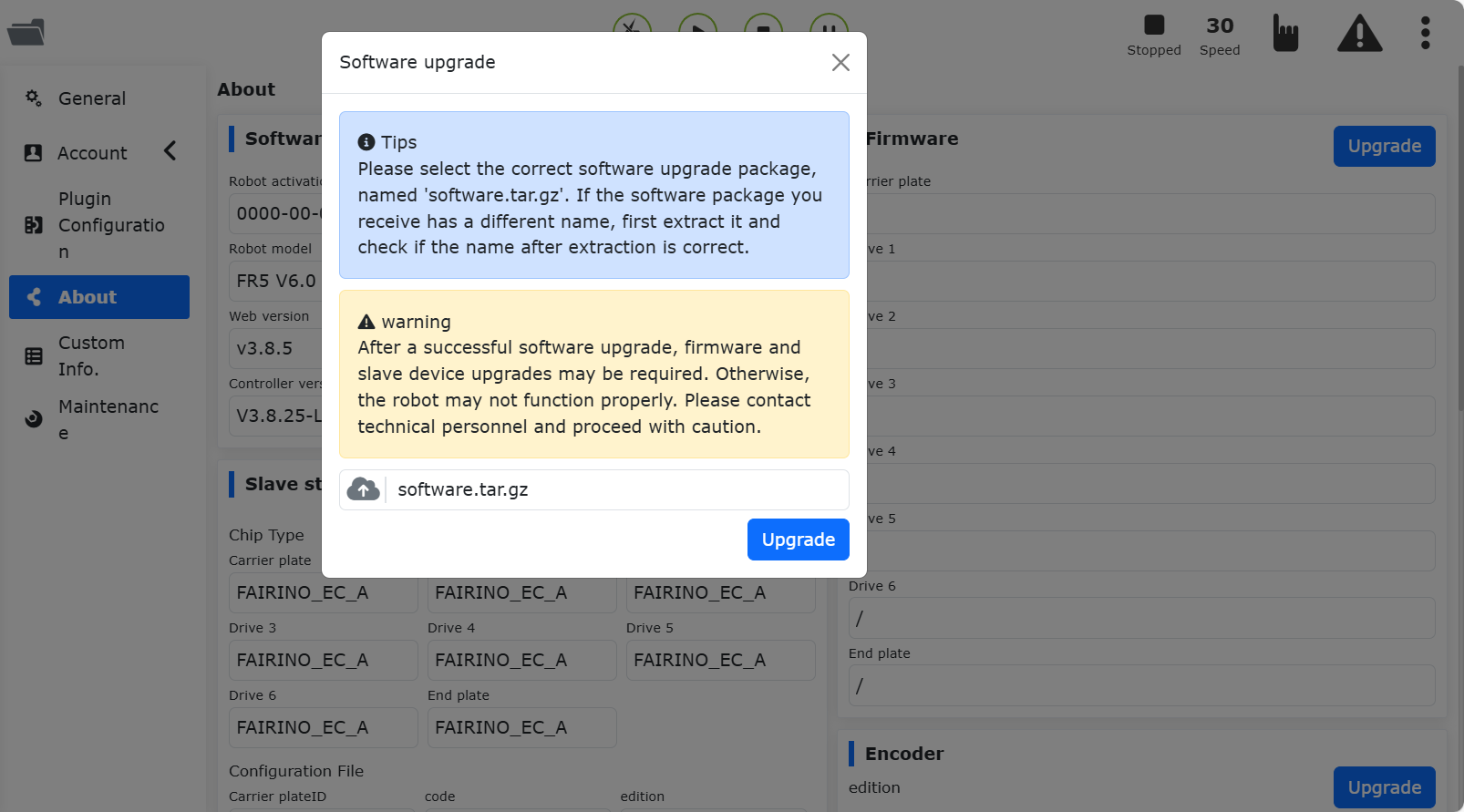
Figura 18.2-8 Diagramma Installazione Scheda Principale FRJ-PCIeN
Figura 18.2-9 Diagramma Installazione Scheda di Espansione Porta di Rete (RJ45) FRJ-PCIeN
Nota
Nota: Serrare tutte le viti.
Il cablaggio tra l’armadio di controllo del robot e il PLC è mostrato di seguito.
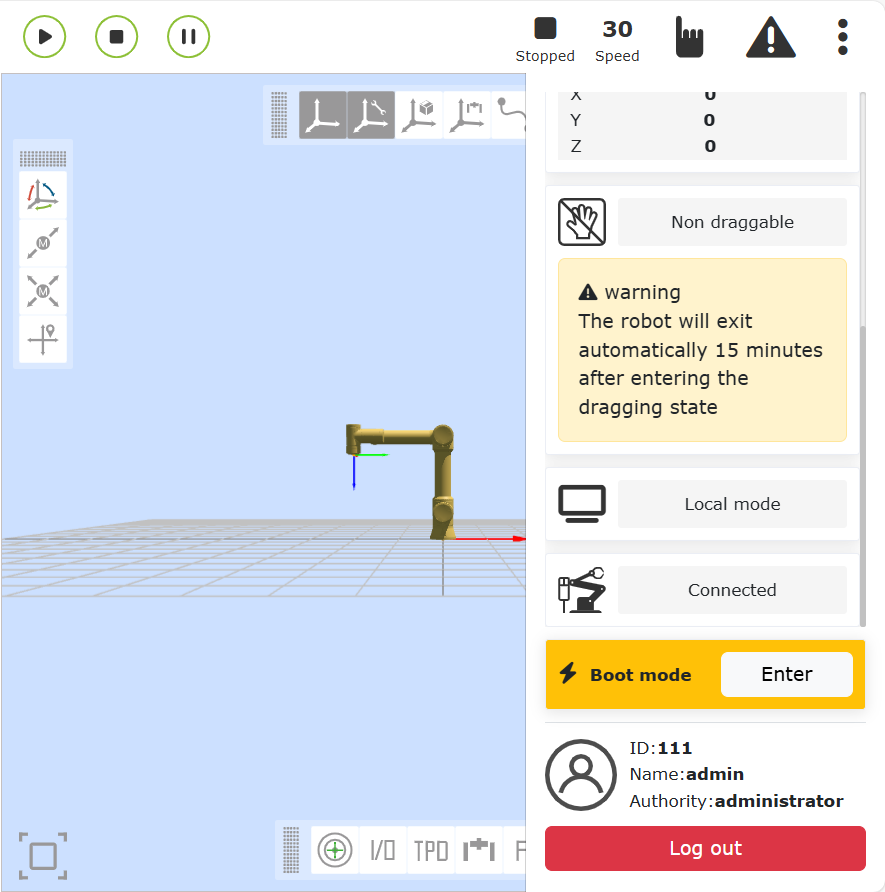
Figura 18.2-10 Diagramma Cablaggio Armadio di Controllo & PLC Mitsubishi
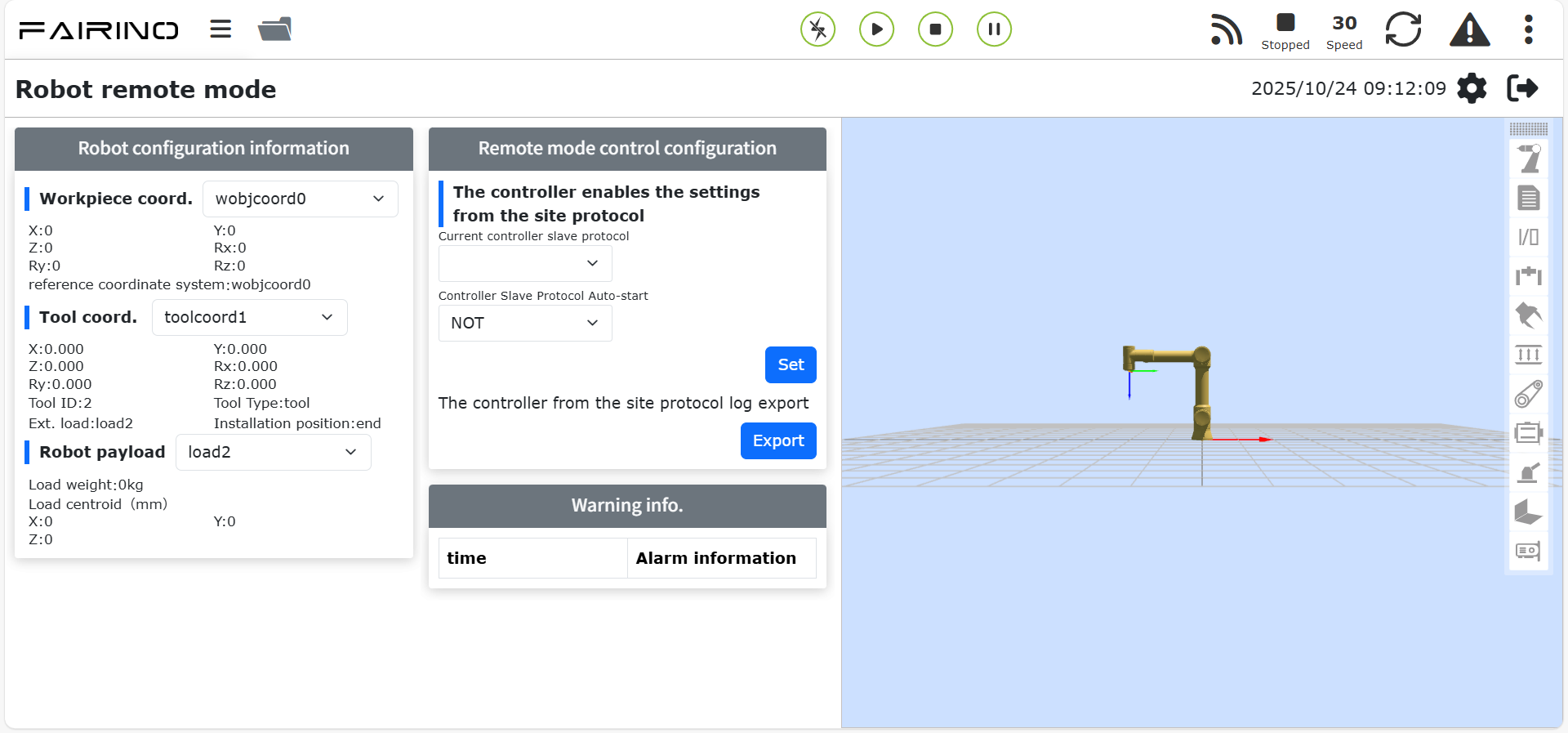
Figura 18.2-11 Diagramma Cablaggio Armadio di Controllo & PLC Siemens
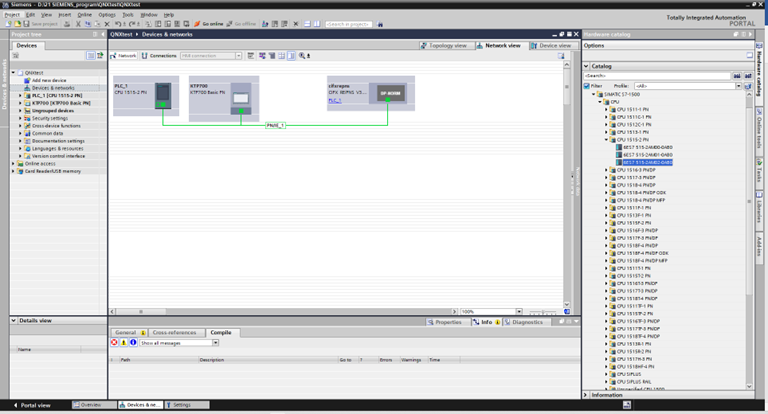
Figura 18.2-12 Diagramma Cablaggio Armadio di Controllo & PLC Omron
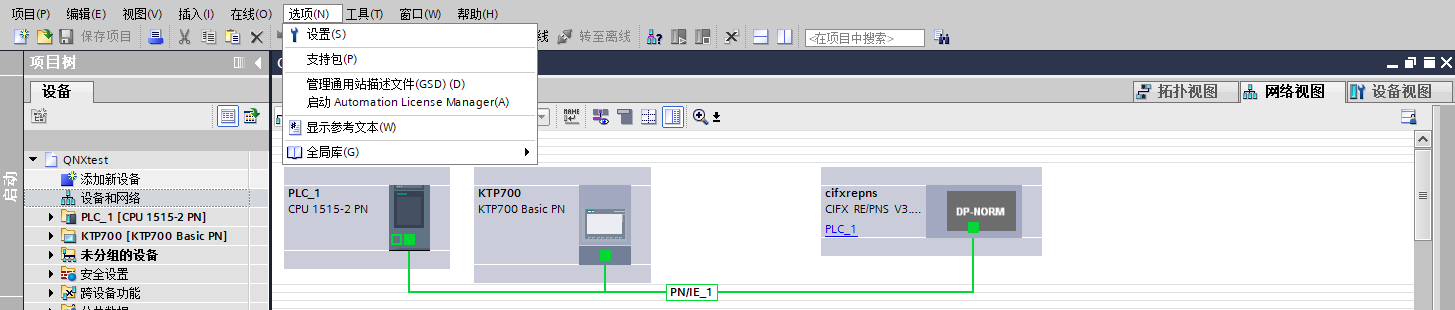
Figura 18.2-13 Diagramma Cablaggio Armadio di Controllo & PLC Omron
Nota
1: Armadio di controllo robot (porta di rete scheda); 2: Switch; 3: PC portatile; 4: PLC Mitsubishi (porta CC-Link IEF Basic); 5: PLC Siemens (porta Profinet); 6: PLC Omron (porta Ethernet/IP); 7: PLC Omron (porta EtherCAT);
Quando il protocollo viene commutato sul bus EtherCAT, le porte di rete della scheda devono essere distinte come EtherCAT_IN ed EtherCAT_OUT. In questo caso, la porta EtherCAT del PLC Omron deve essere collegata direttamente alla porta EtherCAT_IN della scheda tramite un cavo Ethernet.
18.2.2. Configurazione Ambiente PLC
L’ambiente di test configurato per implementare i comandi slave di ciascun protocollo è mostrato nella tabella seguente, includendo i modelli di PLC, le versioni del firmware e il software di test utilizzati per ciascun protocollo.
Tabella 2-1 Ambiente di Test
Protocollo |
Profinet |
CC-link |
|---|---|---|
Marca |
Siemens |
Mitsubishi |
Modello |
CPU 1515-2 PN |
FX5S-30TR/DS |
Firmware |
6ES75152AM020AB0 |
30MR/ES V1.3 |
Software |
TIA Portal V17 |
GXWorks3V1.097B |
Indirizzo IP Scheda |
«192.168.0.2» |
«192.168.0.113» |
Indirizzo IP PLC |
IP non deve essere nella stessa sottorete |
«192.168.0.15» (IP stessa sottorete) |
Protocollo |
Ethernet/IP |
EtherCAT |
|---|---|---|
Marca |
Omron |
Omron |
Modello |
NX102-1100 |
NX102-1100 |
Firmware |
V1.3 |
V1.3 |
Software |
SysmacStudioV1.50 |
SysmacStudioV1.50 |
Indirizzo IP Scheda |
«192.168.0.112» |
«192.168.0.2» |
Indirizzo IP PLC |
«192.168.0.88» (IP stessa sottorete) |
«192.168.0.88» (IP stessa sottorete) |
18.2.2.1. Siemens Profinet
Importazione file GSD (file XML)
Aprire il software di programmazione Siemens TIA Portal V17, creare un nuovo progetto PLC, selezionare «Dispositivi e Reti», e nel «Catalogo Hardware» a destra, fare doppio clic su 6ES7 515-2AM02-0AB0 per aggiungere il modulo PLC.
Nella barra dei menu del software TIA PORTAL, selezionare «Opzioni» -> «Gestisci file descrittivi stazione generale (GSD)» per installare o eliminare i file GSD già installati.
Per installare il file GSD, selezionare «Gestisci file descrittivi stazione generale (GSD)» come sopra. Apparirà la finestra «Gestisci file descrittivi stazione generale».
Selezionare la cartella contenente i file GSD da installare dal «Percorso origine», scegliere uno o più file dall’elenco visualizzato dei file GSD e fare clic sul pulsante «Installa». Come mostrato di seguito.
Dopo l’installazione riuscita, il dispositivo del file GSD installato può essere trovato in «Altri dispositivi di campo» nel catalogo hardware, come mostrato di seguito.
Assegnazione I/O: Trascinare i moduli Input e Output dal catalogo.
Scaricare il programma sul dispositivo: Fare doppio clic su «Dispositivi e Reti» nell’albero del progetto a sinistra, fare clic con il pulsante destro sul modulo «PLC_1», selezionare «Scarica sul dispositivo» dal menu a discesa, fare clic su «Hardware e software (solo modifiche)»:
Cercare e scaricare il dispositivo: Dopo il popup, configurare il tipo di interfaccia PG/PC come mostrato, fare clic su «Avvia ricerca», selezionare il dispositivo su cui scaricare il programma, fare clic su «Scarica»:
18.2.2.2. Mitsubishi CC-link
(1) Importare il file di configurazione Aprire GxWorks3, selezionare «Strumenti» -> «Gestione file di configurazione» -> «Accedi». Dopo il popup, selezionare il file di comunicazione corrispondente, fare clic su «Accedi» per completare l’importazione del file di configurazione.
Impostazioni CC-Link IEF Basic
Creare un progetto PLC, abilitare CC-link: Selezionare «Porta Ethernet» nel menu di navigazione a sinistra, impostare l’indirizzo IP del PLC per assicurarsi che sia sulla stessa sottorete dell’indirizzo della scheda Hilscher. Fare clic su «Utilizzo CC-Link IEF Basic» e selezionare «Utilizza».
Impostazioni configurazione rete CC-Link: Sempre nelle Impostazioni CC-Link IEF Basic, selezionare «Impostazioni configurazione rete». Selezionare il modulo Hilscher CIFX Digital I/O per il modulo. Trascinarlo in basso a sinistra della vista per completare la configurazione hardware.
Impostazioni aggiornamento CC-Link: Sempre nelle Impostazioni CC-Link IEF Basic, fare clic su «Impostazioni aggiornamento». Personalizzare le impostazioni di trasferimento: 256 byte in ricezione, 256 byte in invio.
Download del programma
Dopo aver aperto il programma di test, fare clic su «Online» -> «Scrivi su PLC» per accedere all’interfaccia di download.
Dopo aver aperto l’interfaccia di download, fare clic su «Parametri + Programma» in alto a sinistra, quindi fare clic su «Esegui» in basso a destra per scaricare. Attendere il completamento del download.
18.2.2.3. Omron Ethernet/IP
Creare un nuovo progetto PLC (Questo esempio utilizza il modello: NX102-1100, PLC Omron 1.47):
Creare nuove variabili globali:
Importare il file EDS
Fare clic su «Strumenti» -> «Impostazioni connessione EtherNet/IP»:
Accedere alle impostazioni per il PLC da collegare:
Fare clic con il pulsante destro nell’area vuota del gruppo di tag per creare un nuovo gruppo di tag:
Fare clic con il pulsante destro sul gruppo di tag appena creato, creare tag. Uguale per input e output, entrambi di lunghezza 256 byte:
Accedere alle impostazioni di connessione, fare clic con il pulsante destro nell’area vuota della cassetta degli attrezzi, fare clic con il pulsante destro per visualizzare la libreria EDS:

Installare il file EDS:
Fare clic sul «+» nella cassetta degli attrezzi, aggiungere il dispositivo di destinazione, inserire l’indirizzo IP del dispositivo di destinazione:
Fare clic su «Aggiungi» in basso a destra. Dopo l’aggiunta riuscita, il dispositivo di destinazione viene visualizzato:
Impostazioni parametri EtherNet/IP
Fare clic con il pulsante destro sul dispositivo di destinazione aggiunto, fare clic su «Modifica»:
La lunghezza del mapping dei dati del dispositivo corrente è di 256 byte. Modificare 0001 e 0002 in 256, confermare:
Fare doppio clic sul dispositivo di destinazione, compilare input e output, selezionare la variabile di partenza:
Download del programma
Aprire il programma di test, modificare l’indirizzo IP del PLC sulla stessa sottorete della scheda, scaricare il programma ed eseguirlo.
18.2.2.4. Omron EtherCAT
Creare un nuovo progetto PLC (Questo esempio utilizza il modello: NX102-1100, PLC Omron 1.47):
Creare nuove variabili globali:
Importare il file XML
Fare doppio clic su «EtherCAT» per accedere all’interfaccia delle impostazioni del master, fare clic con il pulsante destro e selezionare «Mostra libreria ESI».
Nella cassetta degli attrezzi a destra, selezionare il dispositivo di destinazione aggiunto, fare doppio clic per aggiungere lo slave:
Impostazioni slave EtherCAT
Impostare «Orologio distribuito valido» dello slave su «Avvia DC»:
Mapping I/O
Fare doppio clic su «Mappa I/O» per associare le variabili agli indirizzi:
Download del programma
Aprire il programma di test, modificare l’indirizzo IP del PLC sulla stessa sottorete della scheda, scaricare il programma ed eseguirlo.
18.3. Istruzioni Operative Modalità Remota Robot
Inserire l’indirizzo IP 192.168.58.2 nel browser. Nome utente è admin, password è 123. Fare clic su «Accedi» per accedere all’interfaccia web dell’armadio di controllo del robot.
Figura 18.2-14 Interfaccia Web Armadio di Controllo
Fare clic su «Impostazioni Sistema» -> «Informazioni» -> Interfaccia Aggiornamento Software. Fare clic sul pulsante «Aggiorna», caricare il pacchetto software da aggiornare, fare clic su «Aggiorna» per iniziare l’aggiornamento. Riavviare l’armadio di controllo al termine dell’aggiornamento.

Figura 18.2-15 Aggiornamento Software
Fare clic sul pulsante di espansione nell’angolo in alto a destra per aprire la barra dei menu. Fare clic su «Modalità Locale» per passare alla «Modalità Remota».

Figura 18.2-16 Commutazione alla Modalità Remota
Selezionare il protocollo slave del controller e se è necessaria la funzione di avvio automatico. Fare clic sul pulsante «Imposta».
Figura 18.2-17 Configurazione Protocollo di Comunicazione
Nota
Per passare da un protocollo all’altro, è necessario prima fare clic sul pulsante «Disinstalla» prima di configurare un altro protocollo.
18.4. Appendice
18.4.1. Elenco Comandi
Codice Comando |
Descrizione Comando |
|---|---|
0x1000 |
Abilitazione Robot |
0x1001 |
Ripristina tutti gli errori |
0x1002 |
Arresto movimento robot |
0x1003 |
Leggi posizione effettiva |
0x1004 |
Imposta velocità robot |
0x1005 |
Continua movimento robot |
0x1006 |
Pausa movimento robot |
0x1007 |
Calcola posizione cartesiana dalla posizione articolare |
0x1008 |
Calcola posizione articolare dalla posizione cartesiana |
0x2000 |
Scrivi informazioni utensile |
0x2001 |
Leggi informazioni utensile |
0x2002 |
Scrivi informazioni pezzo |
0x2003 |
Leggi informazioni pezzo |
0x2004 |
Scrivi informazioni carico |
0x2005 |
Leggi informazioni carico |
0x2006 |
Scrivi informazioni dynamic di riferimento |
0x2007 |
Leggi informazioni dynamic di riferimento |
0x2008 |
Scrivi informazioni dynamic predefinite |
0x2009 |
Leggi informazioni dynamic predefinite |
0x2010 |
Scrivi informazioni finecorsa software |
0x2011 |
Leggi informazioni finecorsa software |
0x3000 |
MoveAxes (basato su angoli articolari) |
0x3001 |
MoveLinear |
0x3002 |
MoveDirect (basato su sistema di coordinate cartesiano) |
0x3003 |
Movimento Jog |
0x3004 |
Arresto Jog |