2. Introduzione al Robot
2.1. Parametri Base
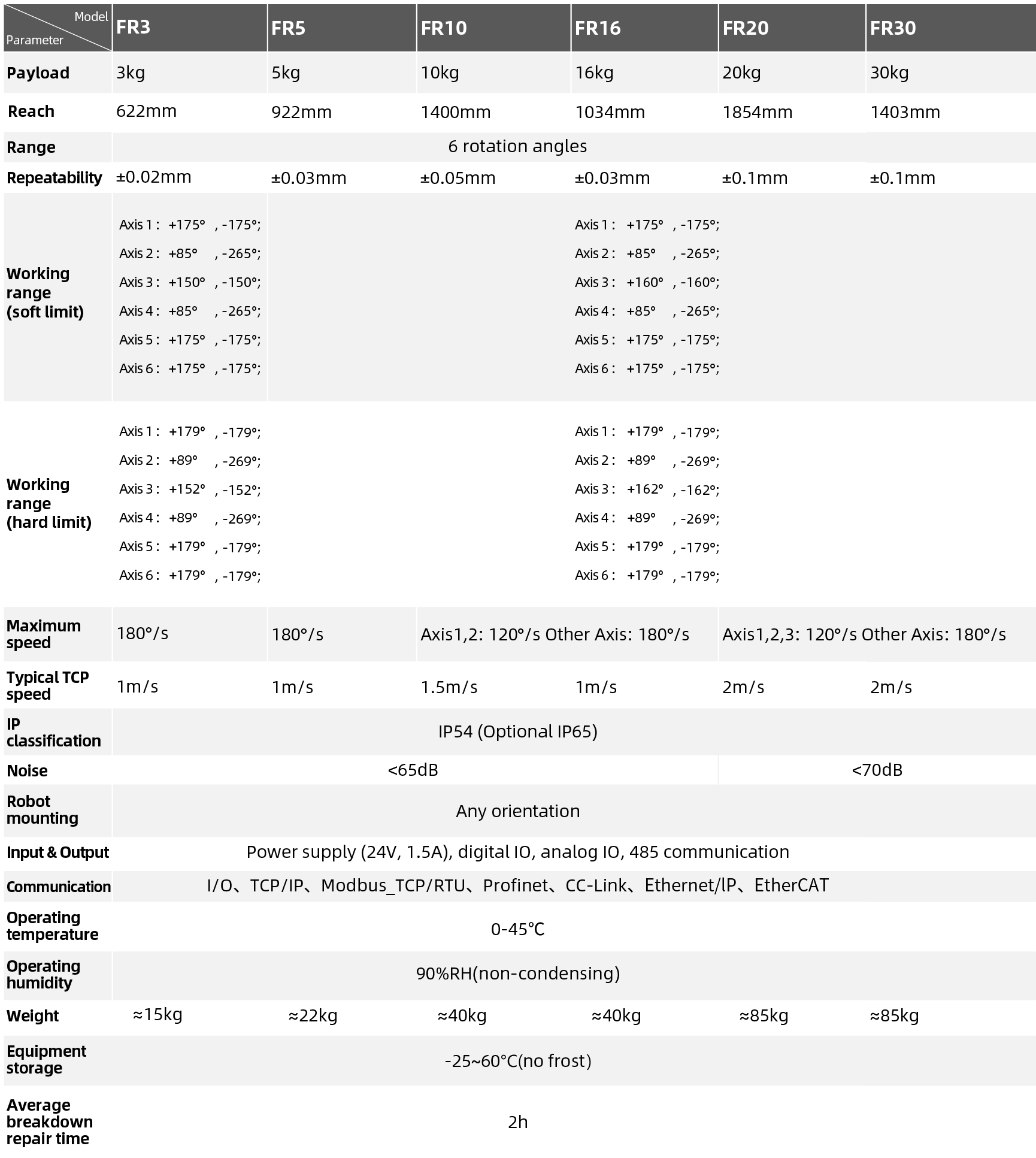
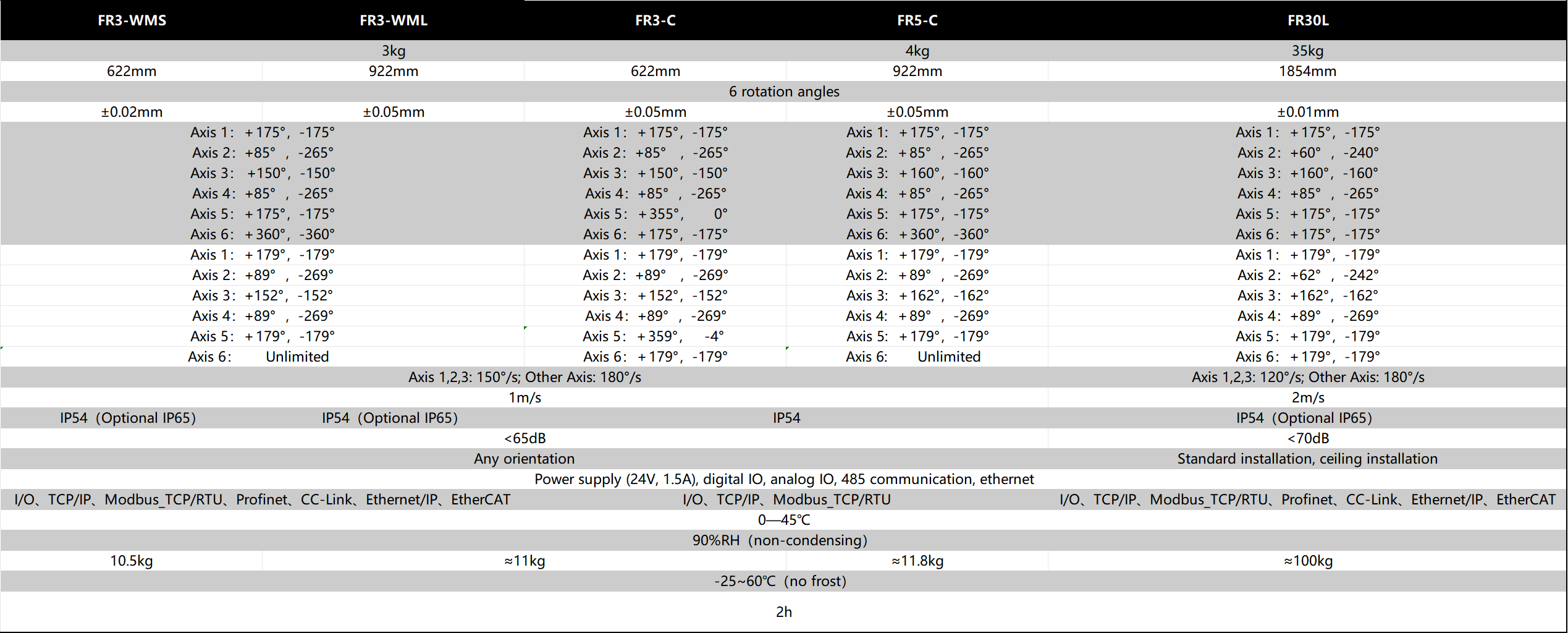
Tabella 2.1-1 Parametri base del robot
Importante
Nella serie FR dei robot, quando si eseguono trasformazioni di posa o di sistemi di coordinate, l’ordine di rotazione degli angoli per il calcolo della matrice di trasformazione omogenea è «ZYX» per il sistema di coordinate mobile.
2.2. Campo di Movimento
Spazio di installazione del braccio robotico:
L’installazione del corpo del robot richiede uno spazio di 3m×3m×2m (lunghezza×larghezza×altezza) per soddisfare il movimento del robot alla massima apertura del braccio. Se l’utente aumenta autonomamente il carico all’estremità, assicurarsi che lo spazio di installazione lasci un minimo di 500 mm di spazio libero.
Nota
Lo spazio in altezza è influenzato dall’altezza della base di installazione; qui 2m si riferisce alla distanza sopra il piano di riferimento di installazione.
Spazio di installazione della cabina di controllo:
La scatola di controllo deve essere posizionata in una posizione facile da operare, protetta da allagamenti e rischio di folgorazione, a una distanza dal suolo tra 0,6 m e 1,5 m.
Il contenitore deve essere lontano da fonti di calore.
Il lato della scatola di controllo con i cavi ad alta potenza deve avere un’area libera di almeno 150 mm senza ostacoli, gli altri lati devono avere almeno 100 mm senza ostacoli, per facilitare la dissipazione del calore e l’inserimento/rimozione.
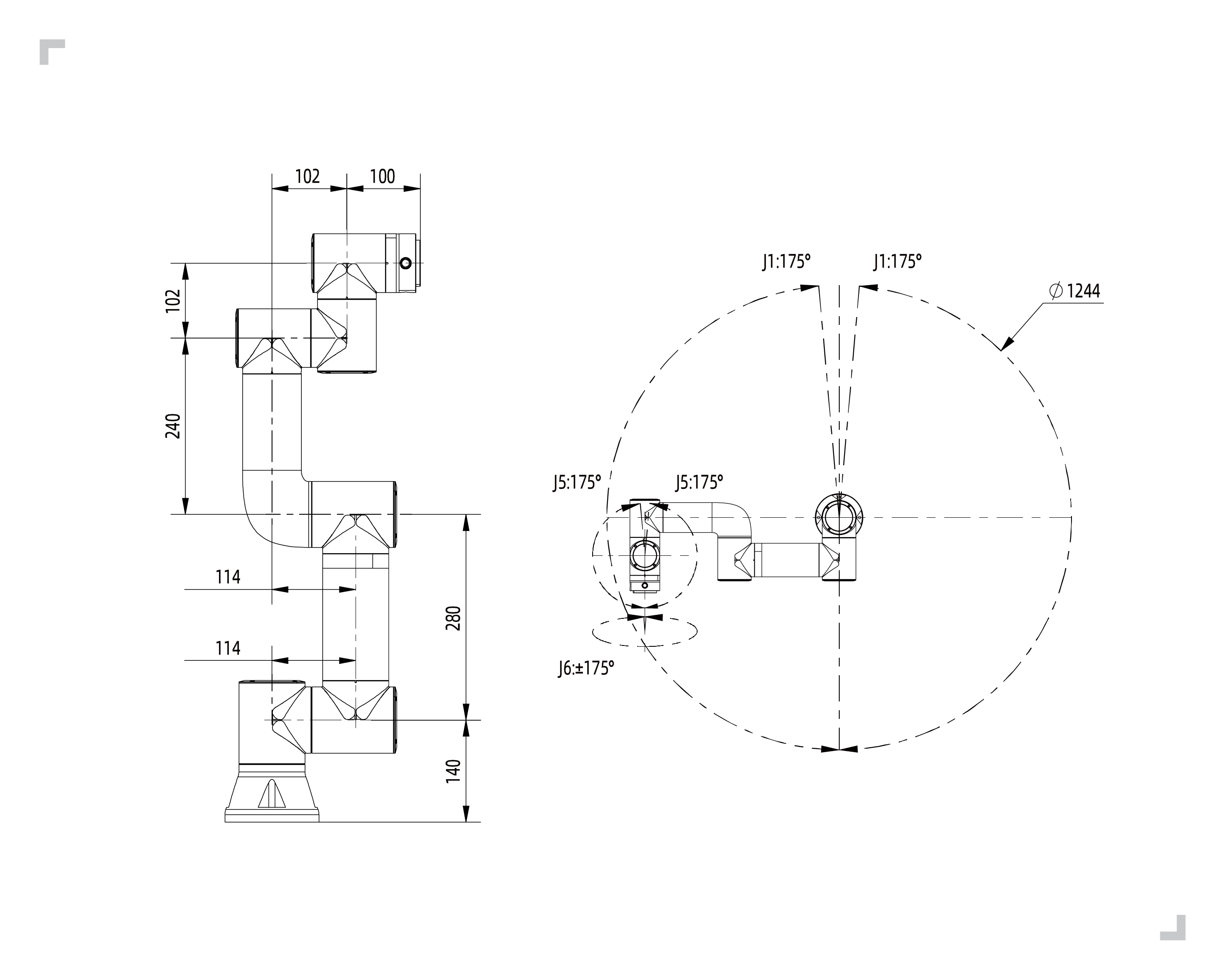
Grafico 2.2-1 Campo di movimento robot collaborativo modello FR3
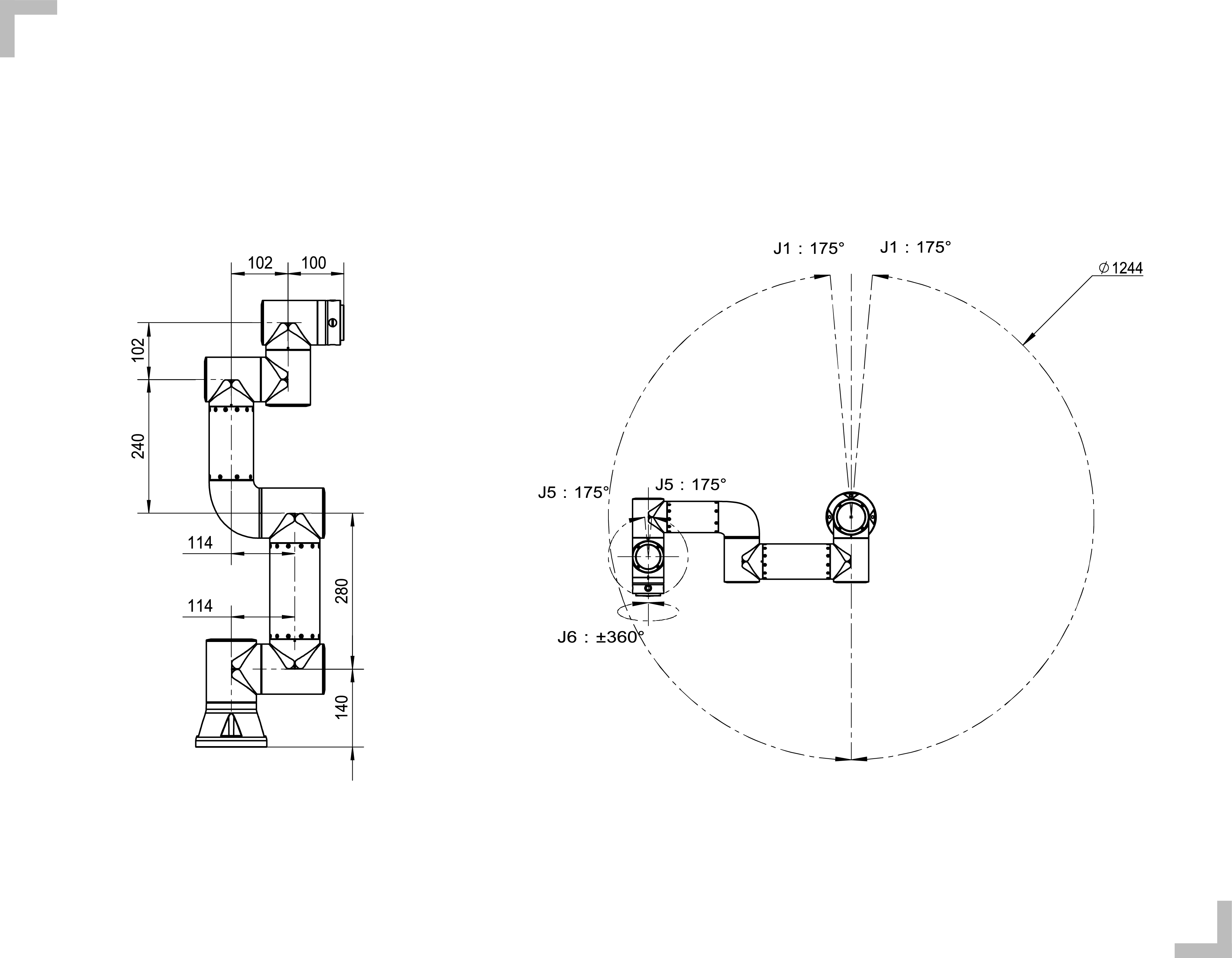
Grafico 2.2-2 Campo di movimento robot collaborativo modello FR3-WML
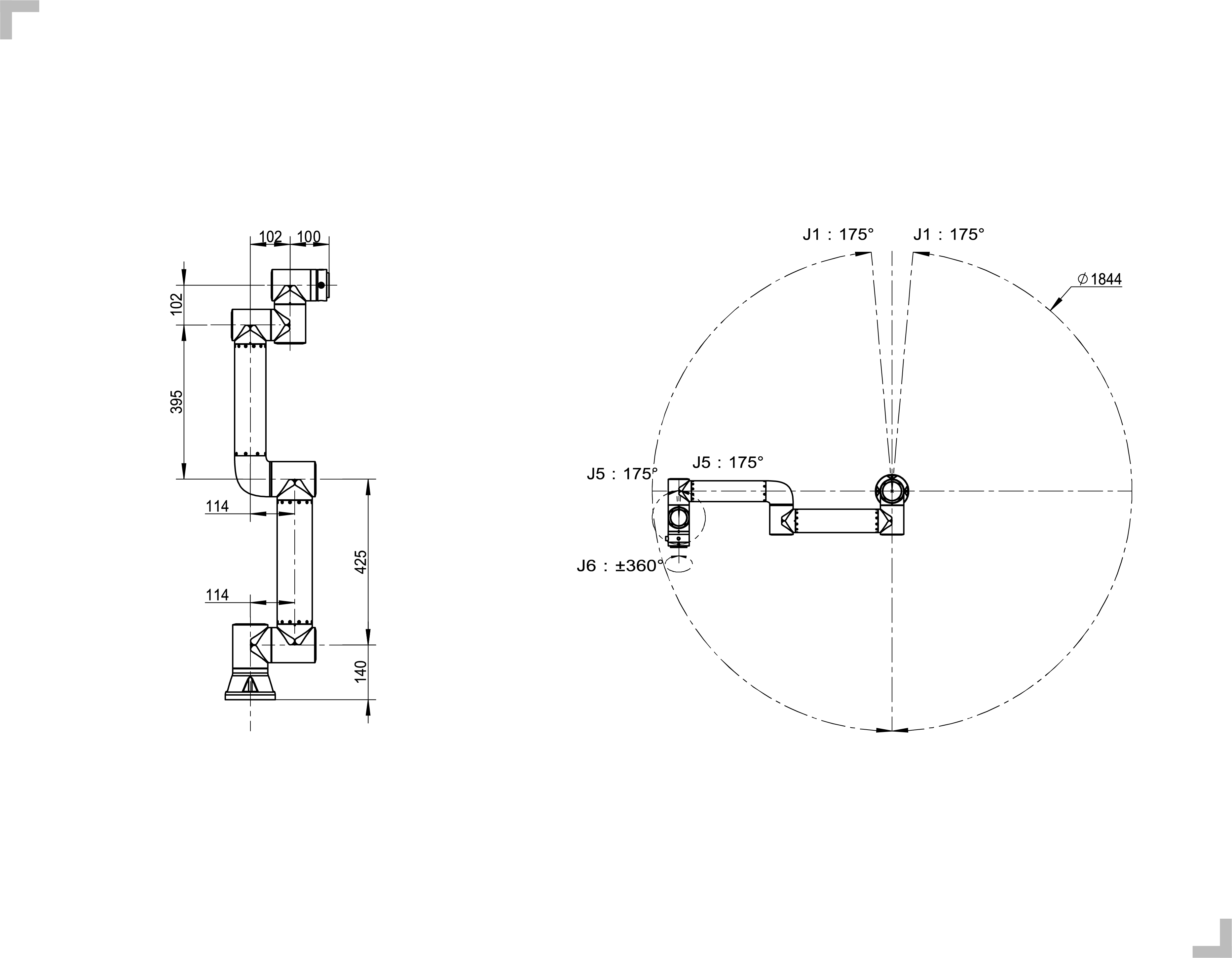
Grafico 2.2-3 Campo di movimento robot collaborativo modello FR3-WMS
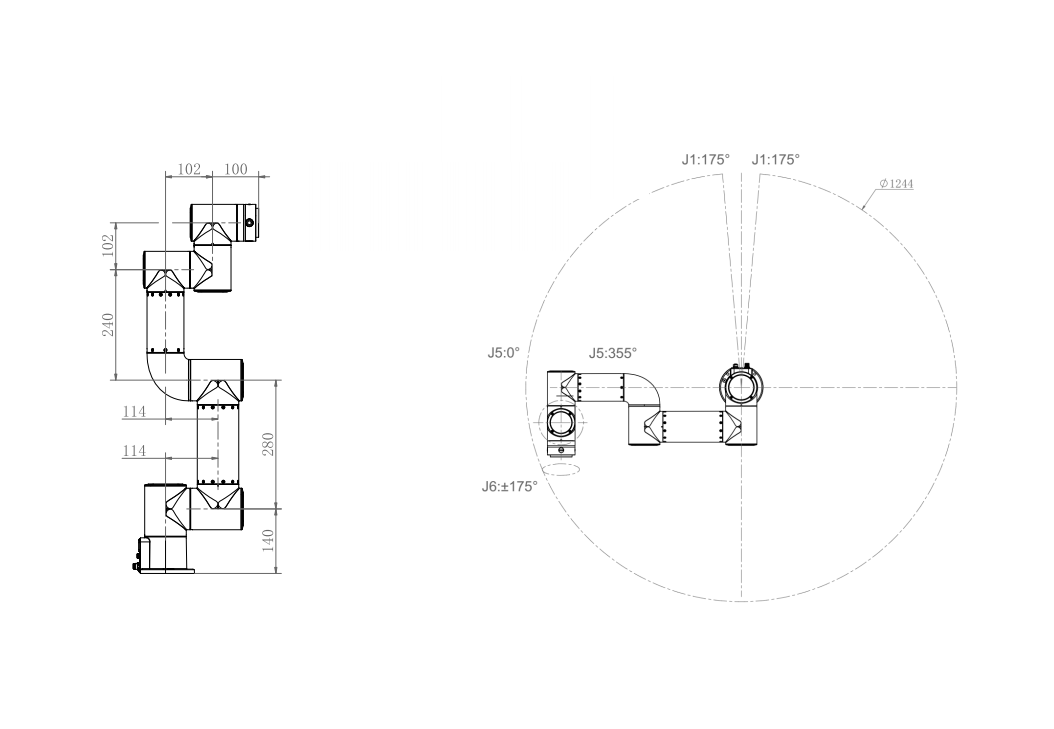
Grafico 2.2-4 Campo di movimento robot collaborativo modello FR3-C
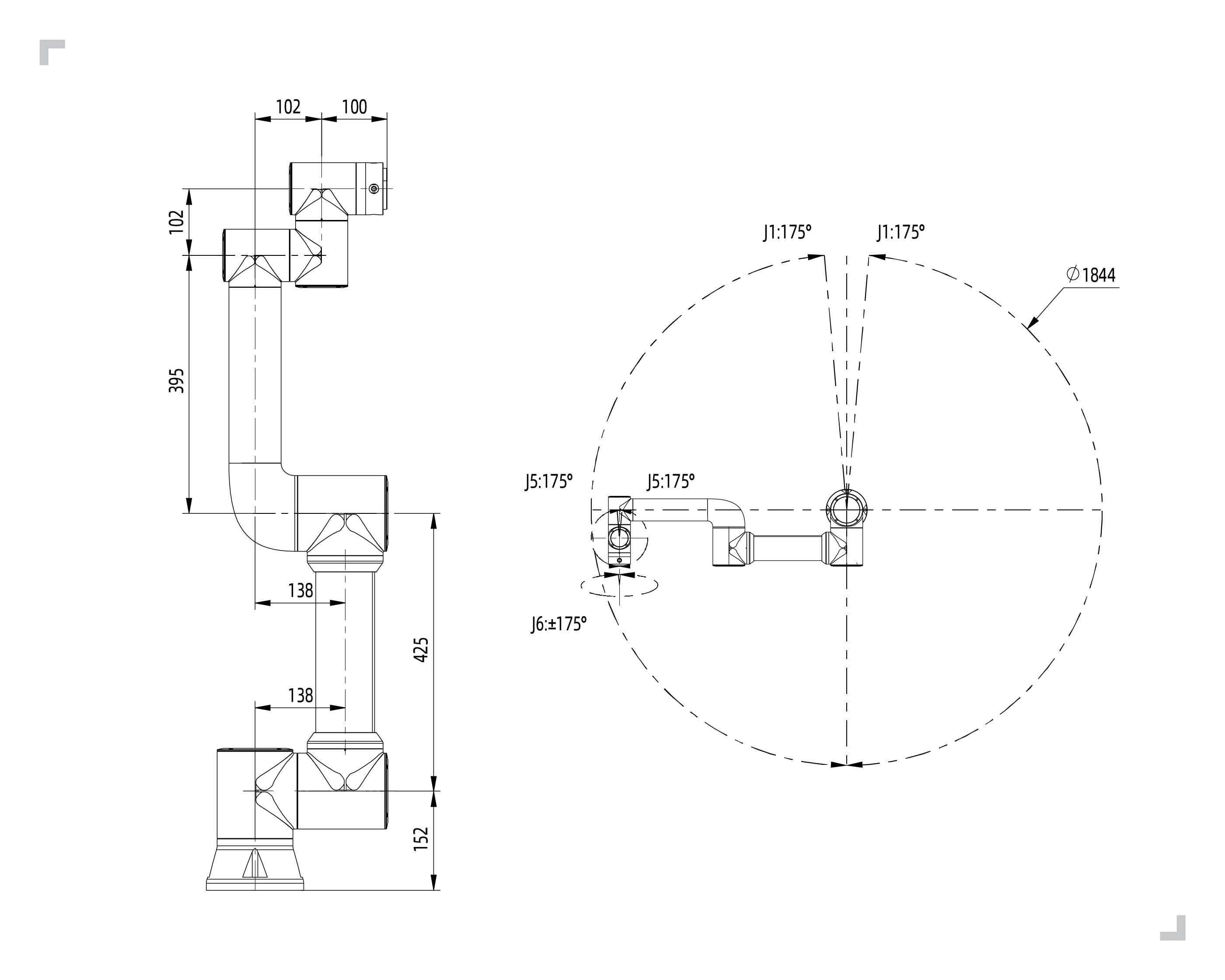
Grafico 2.2-5 Campo di movimento robot collaborativo modello FR5
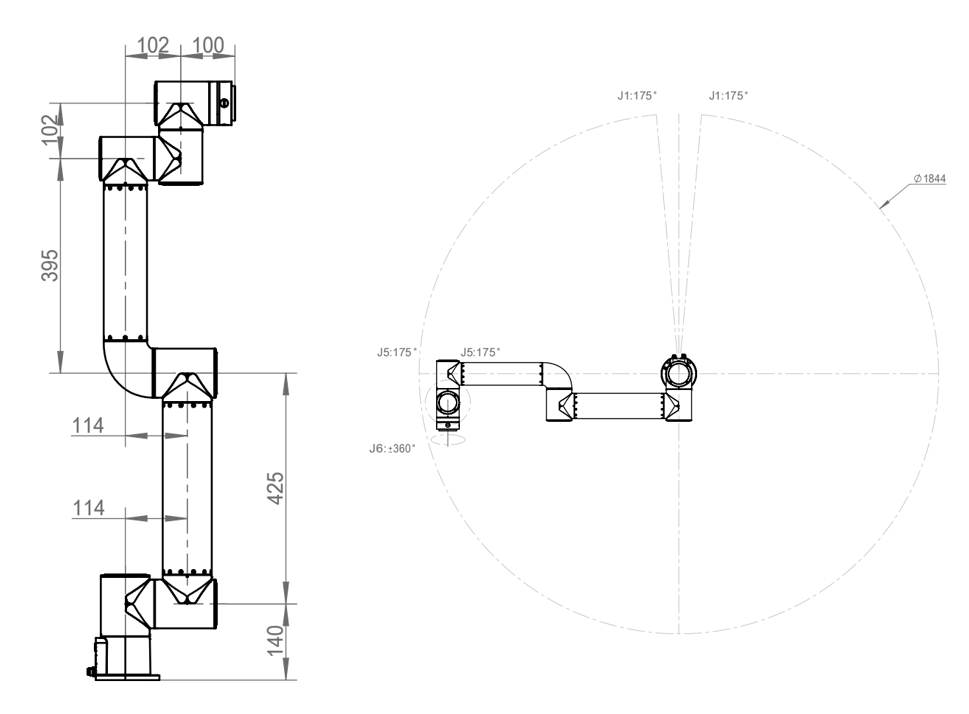
Figura 2.2-6 Robot Collaborativo Modello FR5-C Intervallo di Movimento
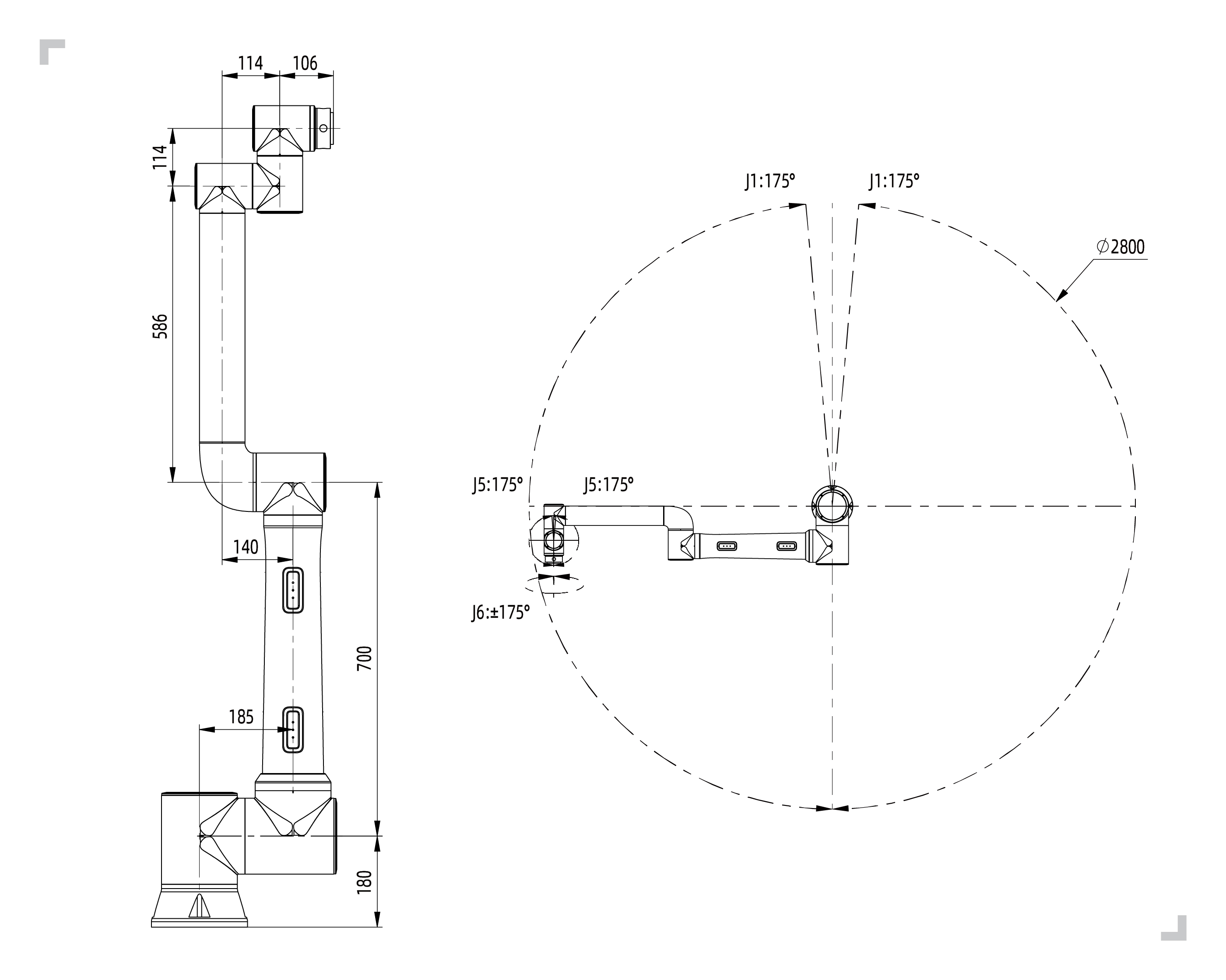
Grafico 2.2-7 Campo di movimento robot collaborativo modello FR10
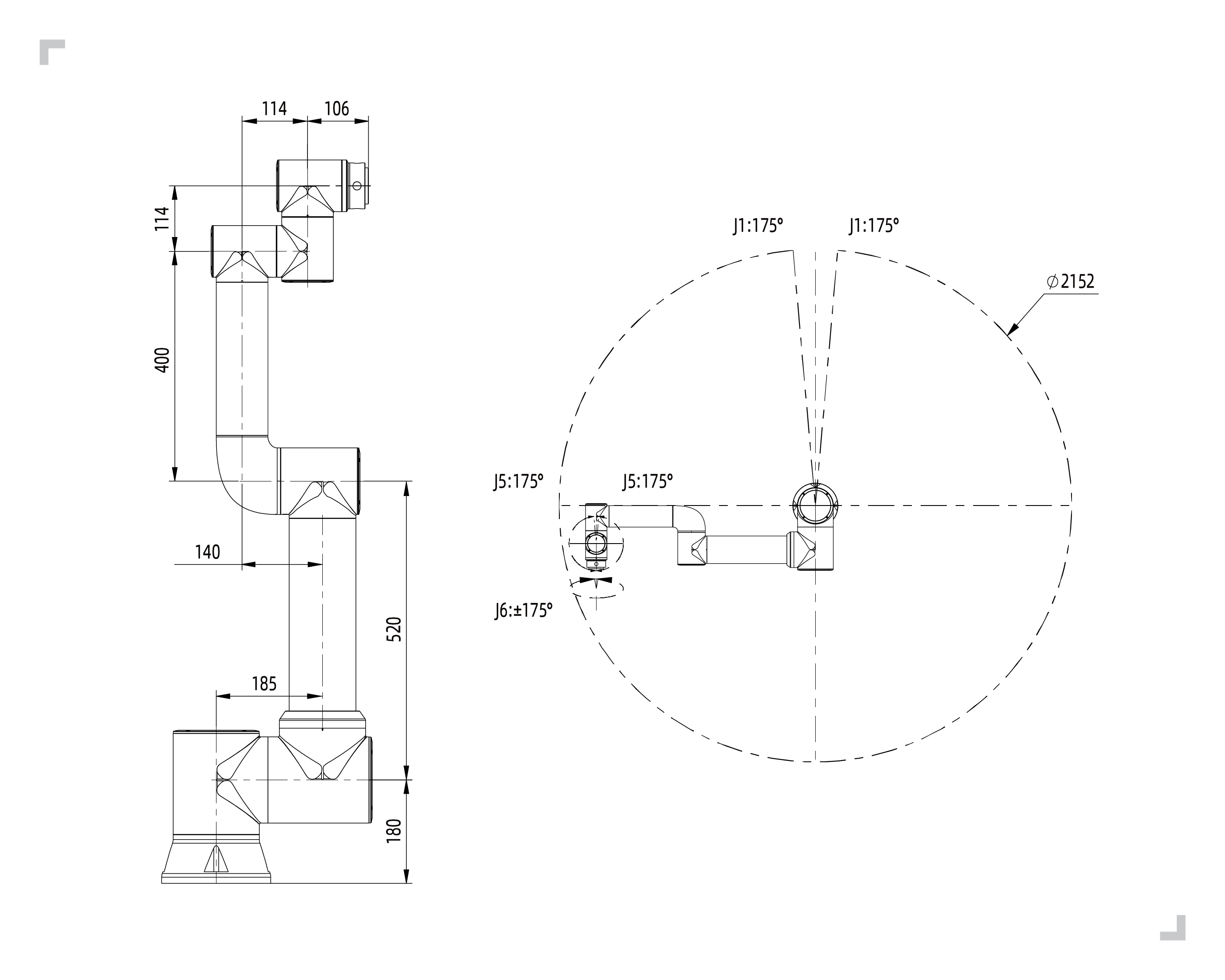
Grafico 2.2-8 Campo di movimento robot collaborativo modello FR16
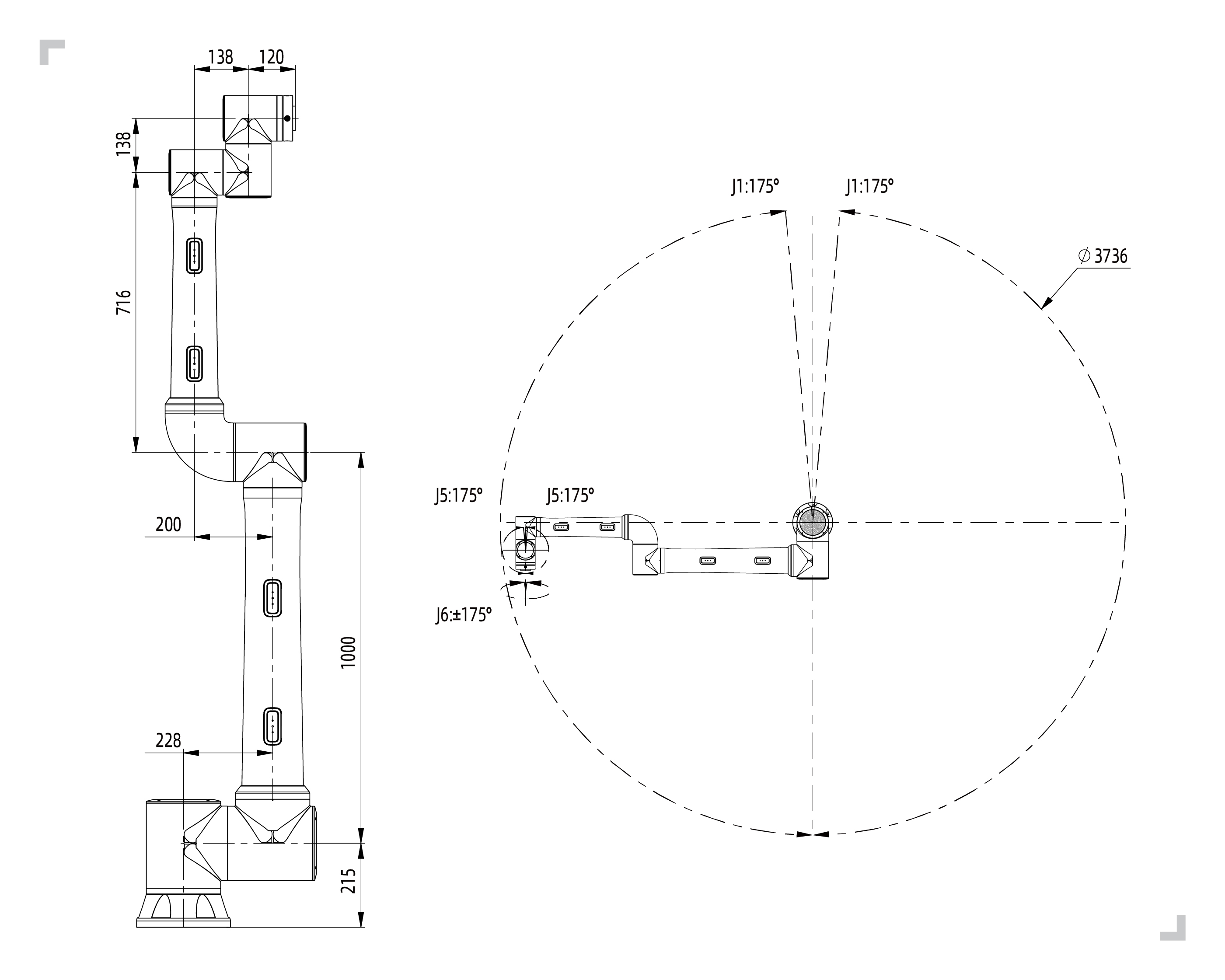
Grafico 2.2-9 Campo di movimento robot collaborativo modello FR20
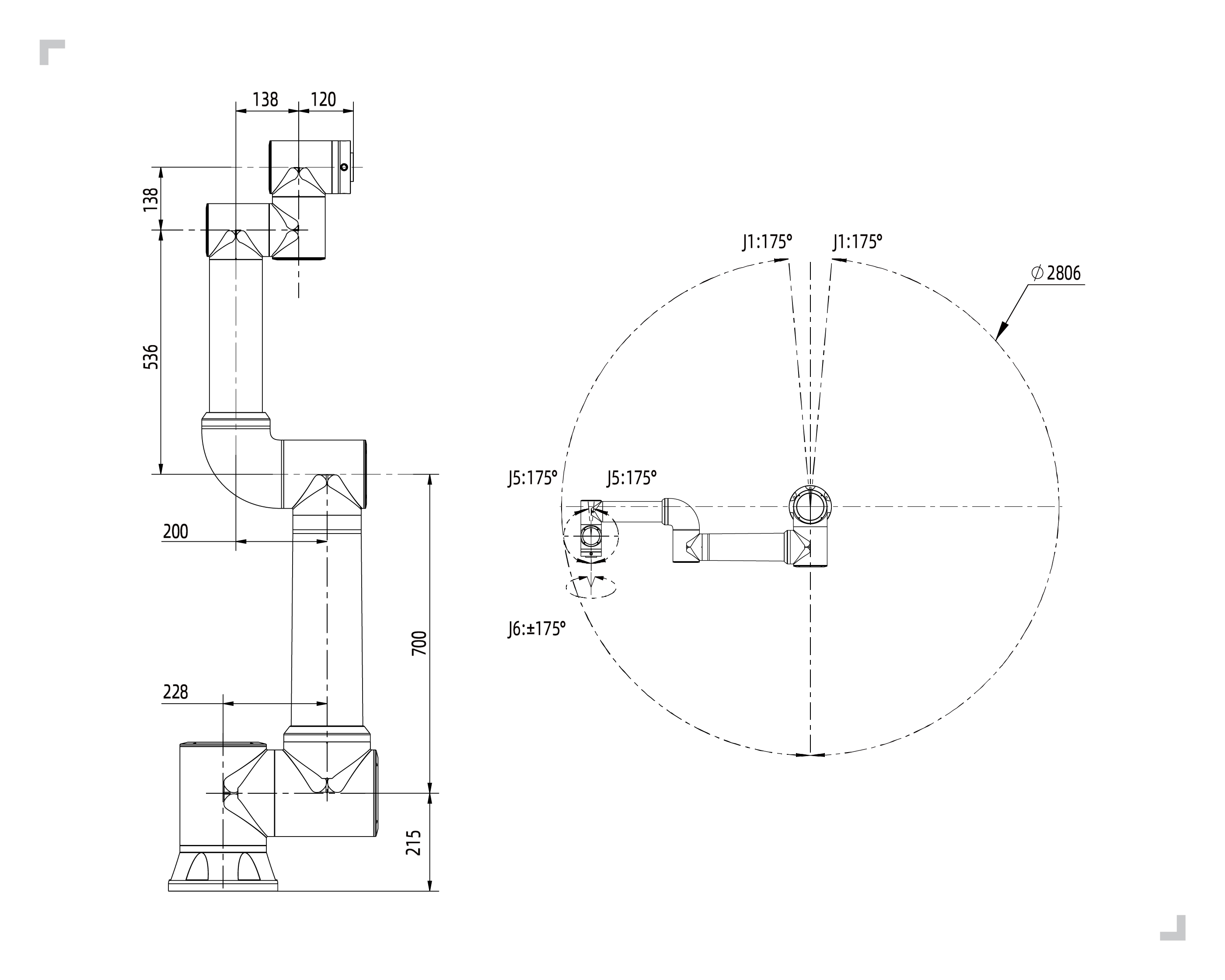
Grafico 2.2-10 Campo di movimento robot collaborativo modello FR30
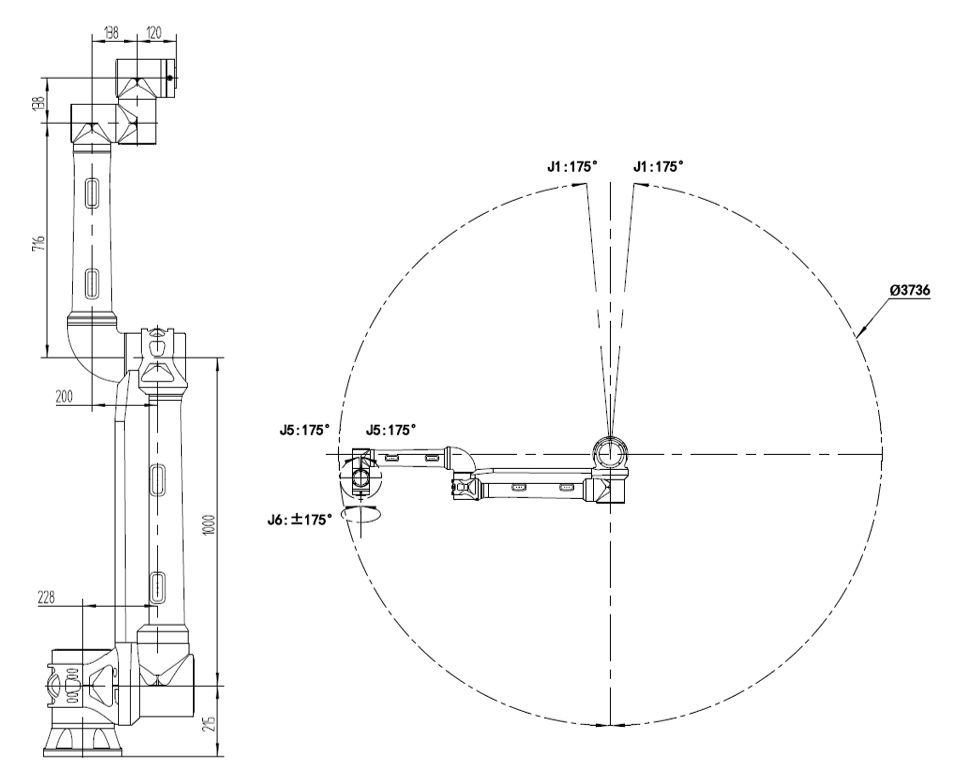
Grafico 2.2-11 Campo di movimento robot collaborativo modello FR30L
2.3. Sistema di Coordinate del Robot
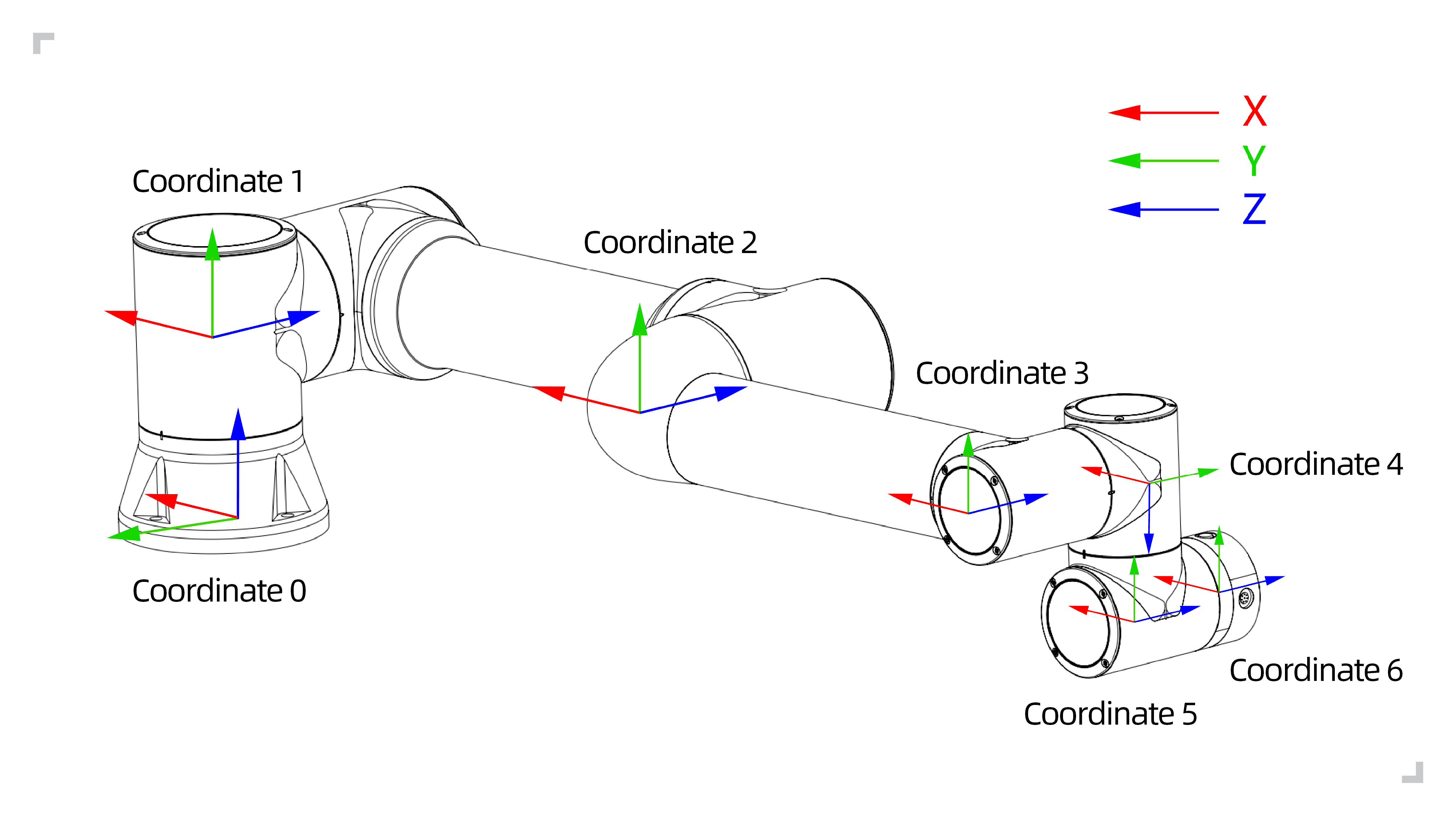
Grafico 2.3-1 Sistema di coordinate parametri DH del robot
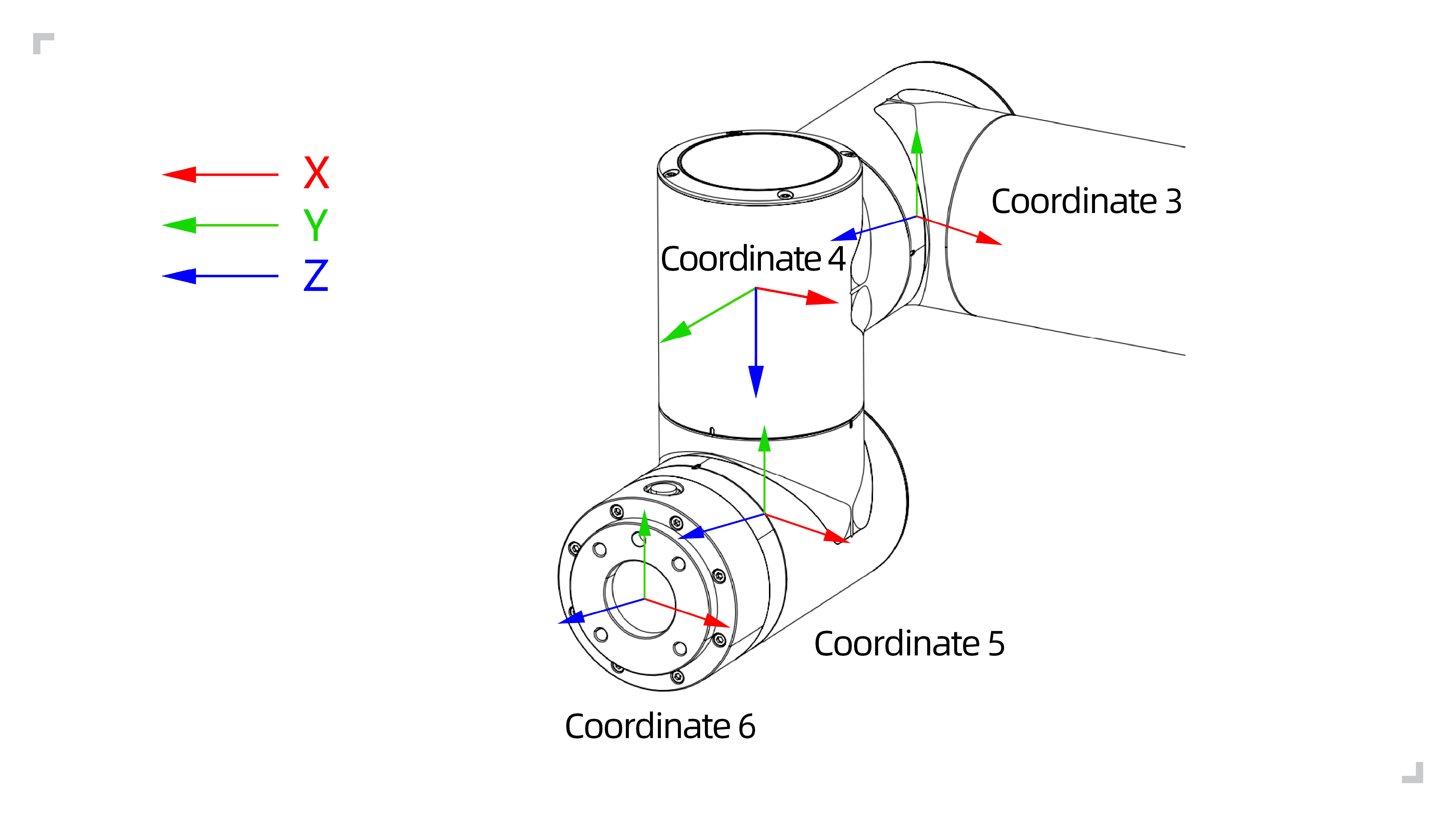
Grafico 2.3-2 Sistema di coordinate della flangia terminale del robot
2.4. Parametri DH del Robot
I parametri DH sono utilizzati per calcolare la cinematica e la dinamica dei robot collaborativi della serie FR.
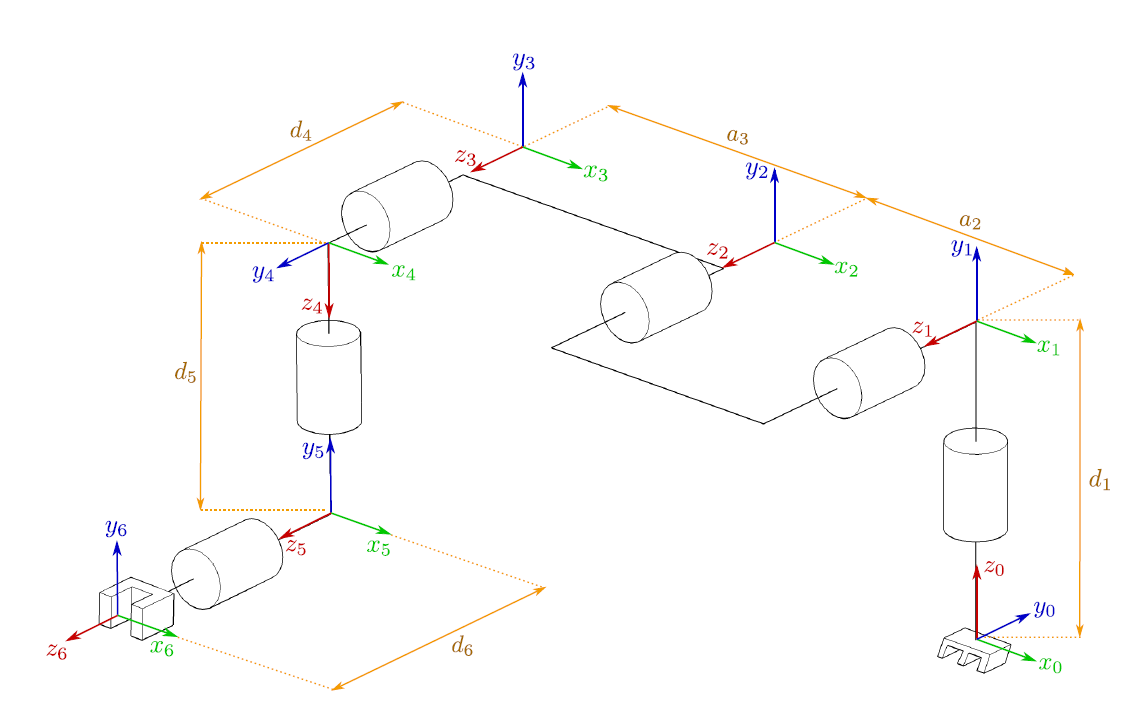
Grafico 2.4-1 Parametri DH dei robot collaborativi serie FR
I parametri DH dei robot collaborativi serie FR sono mostrati di seguito:
Tabella 2.4-1 Tabella parametri DH robot collaborativo FR3
Cinematica |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dinamica |
Massa[kg] |
Centro di Massa[mm] |
Giunto1 |
0 |
0 |
140 |
π/2 |
Collegamento1 |
1.98 |
[-0.05, -15.92, 2.26] |
Giunto2 |
0 |
-280 |
0 |
0 |
Collegamento2 |
3.4445 |
[139.49, 0, 99.54] |
Giunto3 |
0 |
-240 |
0 |
0 |
Collegamento3 |
1.437 |
[58.99, 0.08, 12.99] |
Giunto4 |
0 |
0 |
102 |
π/2 |
Collegamento4 |
0.871 |
[0.05, -2.33, 14.67] |
Giunto5 |
0 |
0 |
102 |
-π/2 |
Collegamento5 |
0.805 |
[-0.05, 2.33, 14.67] |
Giunto6 |
0 |
0 |
100 |
0 |
Collegamento6 |
0.261 |
[-0.05, -1.11, -20.05] |
Tabella 2.4-2 Tabella parametri DH robot collaborativo FR3-WMS
Cinematica |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dinamica |
Massa[kg] |
Centro di Massa[mm] |
Giunto1 |
0 |
140 |
0 |
π/2 |
Collegamento1 |
1.66 |
[-0.06, -13.58, 1.68] |
Giunto2 |
0 |
0 |
-280 |
0 |
Collegamento2 |
3.68 |
[140.11, 0, 101.71] |
Giunto3 |
0 |
0 |
-240 |
0 |
Collegamento3 |
1.81 |
[63.49, 0.1, 10.94] |
Giunto4 |
0 |
102 |
0 |
π/2 |
Collegamento4 |
1.18 |
[0.07, -2.18, 12.48] |
Giunto5 |
0 |
102 |
0 |
-π/2 |
Collegamento5 |
1.18 |
[-0.07, 2.18, 12.48] |
Giunto6 |
0 |
100 |
0 |
0 |
Collegamento6 |
0.28 |
[1.81, 1.33, -20.41] |
Tabella 2.4-3 Tabella parametri DH robot collaborativo FR3-WML
Cinematica |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dinamica |
Massa[kg] |
Centro di Massa[mm] |
Giunto1 |
0 |
140 |
0 |
π/2 |
Collegamento1 |
1.54 |
[-0.01, -14.27, 1.37] |
Giunto2 |
0 |
0 |
-425 |
0 |
Collegamento2 |
3.49 |
[212.5, 0, 101.43] |
Giunto3 |
0 |
0 |
-395 |
0 |
Collegamento3 |
2 |
[114.17, 0.08, 9.92] |
Giunto4 |
0 |
102 |
0 |
π/2 |
Collegamento4 |
1.17 |
[0.07, -2.18, 12.48] |
Giunto5 |
0 |
102 |
0 |
-π/2 |
Collegamento5 |
1.17 |
[-0.07, 2.18, 12.48] |
Giunto6 |
0 |
100 |
0 |
0 |
Collegamento6 |
0.28 |
[1.9, 1.6, -20.08] |
Tabella 2.4-4 Tabella parametri DH robot collaborativo FR3-C
Cinematica |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dinamica |
Massa[kg] |
Centro di Massa[mm] |
Giunto1 |
0 |
140 |
0 |
π/2 |
Collegamento1 |
1.69 |
[-0.16, -13.99, 1.53] |
Giunto2 |
0 |
0 |
-280 |
0 |
Collegamento2 |
3.73 |
[140, 0, 101.34] |
Giunto3 |
0 |
0 |
-240 |
0 |
Collegamento3 |
1.84 |
[63.24, 0.08, 11.04] |
Giunto4 |
0 |
102 |
0 |
π/2 |
Collegamento4 |
1.2 |
[0.1, -2.03, 12.55] |
Giunto5 |
0 |
102 |
0 |
-π/2 |
Collegamento5 |
1.2 |
[-0.1, 2.03, 12.55] |
Giunto6 |
0 |
100 |
0 |
0 |
Collegamento6 |
0.53 |
[1.48, 1.54, -17.9] |
Tabella 2.4-5 Tabella parametri DH robot collaborativo FR5
Cinematica |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dinamica |
Massa[kg] |
Centro di Massa[mm] |
Giunto1 |
0 |
0 |
152 |
π/2 |
Collegamento1 |
4.64 |
[-0.19, -18.28, 2.26] |
Giunto2 |
0 |
-425 |
0 |
0 |
Collegamento2 |
10.08 |
[212.47, 0, 121.2] |
Giunto3 |
0 |
-395 |
0 |
0 |
Collegamento3 |
2.71 |
[122.62, 0.17, 12.59] |
Giunto4 |
0 |
0 |
102 |
π/2 |
Collegamento4 |
1.56 |
[0.05, -2.33, 14.68] |
Giunto5 |
0 |
0 |
102 |
-π/2 |
Collegamento5 |
1.56 |
[-0.05, 2.33, 14.68] |
Giunto6 |
0 |
0 |
100 |
0 |
Collegamento6 |
0.36 |
[0.93, 0.81, -20.05] |
Tabella 2.4-6 Parametri DH del Robot Collaborativo FR5-C
Cinematica |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dinamica |
Massa[kg] |
Centro di Massa[mm] |
Giunto1 |
0 |
0 |
140 |
π/2 |
Link1 |
1.76 |
[-0.09, -15.66, 1.53] |
Giunto2 |
0 |
-280 |
0 |
0 |
Link2 |
3.98 |
[211.32, 0, 101.13] |
Giunto3 |
0 |
-240 |
0 |
0 |
Link3 |
2.08 |
[102.62, 0.12, 11.26] |
Giunto4 |
0 |
0 |
102 |
π/2 |
Link4 |
1.33 |
[0.09, -1.86, 13.76] |
Giunto5 |
0 |
0 |
102 |
-π/2 |
Link5 |
1.33 |
[-0.09, 1.86, 13.76] |
Giunto6 |
0 |
0 |
100 |
0 |
Link6 |
0.28 |
[-0.26, 1.75, -20.50] |
Tabella 2.4-7 Tabella parametri DH robot collaborativo FR5-WML
Cinematica |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dinamica |
Massa[kg] |
Centro di Massa[mm] |
Giunto1 |
0 |
180 |
0 |
π/2 |
Collegamento1 |
11.49 |
[-0.16, -28.51, 4.16] |
Giunto2 |
0 |
0 |
-970 |
0 |
Collegamento2 |
21.3 |
[642.59, 0.04, 165.62] |
Giunto3 |
0 |
0 |
-816 |
0 |
Collegamento3 |
4.61 |
[321.39, 0.16, 52.76] |
Giunto4 |
0 |
159 |
0 |
π/2 |
Collegamento4 |
1.66 |
[0.21, -3.06, 13.07] |
Giunto5 |
0 |
114 |
0 |
-π/2 |
Collegamento5 |
1.66 |
[-0.21, 3.06, 13.07] |
Giunto6 |
0 |
160 |
0 |
0 |
Collegamento6 |
0.36 |
[1.45, 1.09, -19.98] |
Tabella 2.4-8 Tabella parametri DH robot collaborativo FR10
Cinematica |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dinamica |
Massa[kg] |
Centro di Massa[mm] |
Giunto1 |
0 |
0 |
180 |
π/2 |
Collegamento1 |
11.97 |
[-0.10, -26.12, 4.04] |
Giunto2 |
0 |
-700 |
0 |
0 |
Collegamento2 |
19.59 |
[480.27, 0.01, 164.68] |
Giunto3 |
0 |
-586 |
0 |
0 |
Collegamento3 |
3.7 |
[211.22, 0.11, 54.21] |
Giunto4 |
0 |
0 |
159 |
π/2 |
Collegamento4 |
1.69 |
[0.12, -3, 12.18] |
Giunto5 |
0 |
0 |
114 |
-π/2 |
Collegamento5 |
1.69 |
[-0.12, 3, 12.18] |
Giunto6 |
0 |
0 |
106 |
0 |
Collegamento6 |
0.35 |
[1.24, 0.85, -20.34] |
Tabella 2.4-9 Tabella parametri DH robot collaborativo FR16
Cinematica |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dinamica |
Massa[kg] |
Centro di Massa[mm] |
Giunto1 |
0 |
0 |
180 |
π/2 |
Collegamento1 |
11.97 |
[-0.10, -26.12, 4.04] |
Giunto2 |
0 |
-520 |
0 |
0 |
Collegamento2 |
18.18 |
[364.4, 0.01, 163.09] |
Giunto3 |
0 |
-400 |
0 |
0 |
Collegamento3 |
3.22 |
[135.03, 0.12, 55.58] |
Giunto4 |
0 |
0 |
159 |
π/2 |
Collegamento4 |
1.69 |
[0.12, -3, 12.18] |
Giunto5 |
0 |
0 |
114 |
-π/2 |
Collegamento5 |
1.69 |
[-0.12, 3, 12.18] |
Giunto6 |
0 |
0 |
106 |
0 |
Collegamento6 |
0.35 |
[1.24, 0.85, -20.34] |
Tabella 2.4-10 Tabella parametri DH robot collaborativo FR20
Cinematica |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dinamica |
Massa[kg] |
Centro di Massa[mm] |
Giunto1 |
0 |
0 |
215 |
π/2 |
Collegamento1 |
20.79 |
[-0.19, -36.57, 5.68] |
Giunto2 |
0 |
-1000 |
0 |
0 |
Collegamento2 |
42.84 |
[605.25, 0.06, 202.94] |
Giunto3 |
0 |
-716 |
0 |
0 |
Collegamento3 |
9.88 |
[262.84, 0.22, 43.08] |
Giunto4 |
0 |
0 |
166 |
π/2 |
Collegamento4 |
4.64 |
[0.23, -2.28, 18.42] |
Giunto5 |
0 |
0 |
138 |
-π/2 |
Collegamento5 |
4.64 |
[-0.23, 2.28, 18.42] |
Giunto6 |
0 |
0 |
120 |
0 |
Collegamento6 |
0.6 |
[-2.11, -1.96, -20.38] |
Tabella 2.4-11 Tabella parametri DH robot collaborativo FR30
Cinematica |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dinamica |
Massa[kg] |
Centro di Massa[mm] |
Giunto1 |
0 |
0 |
215 |
π/2 |
Collegamento1 |
20.64 |
[-0.22, -37.39, 5.59] |
Giunto2 |
0 |
-700 |
0 |
0 |
Collegamento2 |
36.37 |
[440.73, 0.05, 198.7] |
Giunto3 |
0 |
-536 |
0 |
0 |
Collegamento3 |
8.41 |
[185.64, 0.25, 45.82] |
Giunto4 |
0 |
0 |
166 |
π/2 |
Collegamento4 |
4.64 |
[0.23, -2.29, 18.60] |
Giunto5 |
0 |
0 |
138 |
-π/2 |
Collegamento5 |
4.64 |
[-0.23, 2.29, 18.60] |
Giunto6 |
0 |
0 |
120 |
0 |
Collegamento6 |
0.6 |
[-2.11, -1.96, -20.38] |
Tabella 2.4-12 Tabella parametri DH robot collaborativo FR30L
Cinematica |
theta[rad] |
a[mm] |
d[mm] |
alpha[rad] |
Dinamica |
Massa[kg] |
Centro di Massa[mm] |
Giunto1 |
0 |
0 |
215 |
π/2 |
Collegamento1 |
27.85 |
[-0.18, -26.29, 14.57] |
Giunto2 |
0 |
-1000 |
0 |
0 |
Collegamento2 |
50.43 |
[580.62, 0.04, 223.34] |
Giunto3 |
0 |
-716 |
0 |
0 |
Collegamento3 |
9.88 |
[262.84, 0.22, 43.08] |
Giunto4 |
0 |
0 |
166 |
π/2 |
Collegamento4 |
4,64 |
[0.23, -2.28, 18.42] |
Giunto5 |
0 |
0 |
138 |
-π/2 |
Collegamento5 |
4.64 |
[-0.23, 2.28, 18.42] |
Giunto6 |
0 |
0 |
120 |
0 |
Collegamento6 |
0.6 |
[-2.11, -1.96, -20.38] |