18. Istruzioni Slave per Protocollo Personalizzato
18.1. Panoramica
Per facilitare il controllo del movimento del robot da parte del PLC tramite diversi protocolli di bus industriale (CC-Link IEF Basic, Profinet, Ethernet/IP ed EtherCAT), sono state aggiunte le schede FRH-PCIeN-EC/EIP/CC/PN-RJ-V10, FRJ-PCIeN-EIP/CC/PN-RJ-V10 e FRJ-PCIeN-EC/PN/EIP/CC-RJ-V20 al control cabinet integrato mini.
18.2. Configurazione dell’Ambiente
Le descrizioni dei modelli delle schede e delle versioni software sono le seguenti:
Tipo di protocollo |
Modello di scheda |
Versione software del robot |
|---|---|---|
CC-Link IEF Basic |
Scheda FRJ-PCIeN-EIP/CC/PN-RJ-V10 |
V3.8.4 e successive |
CC-Link IEF Basic |
Scheda FRJ-PCIeN-EC/PN/EIP/CC-RJ-V20 |
V3.9.5 e successive |
Profinet |
Scheda FRJ-PCIeN-EIP/CC/PN-RJ-V10 |
V3.8.4 e successive |
Profinet |
Scheda FRJ-PCIeN-EC/PN/EIP/CC-RJ-V20 |
V3.9.5 e successive |
Ethernet/IP |
Scheda FRJ-PCIeN-EIP/CC/PN-RJ-V10 |
V3.8.4 e successive |
Ethernet/IP |
Scheda FRJ-PCIeN-EC/PN/EIP/CC-RJ-V20 |
V3.9.5 e successive |
EtherCAT |
Scheda FRJ-PCIeN-EC/PN/EIP/CC-RJ-V20 |
V3.9.5 e successive |
18.2.1. Setup Hardware Scheda FRH-PCIeN-EC/EIP/CC/PN-RJ-V10
Installare la scheda FRH-PCIeN-EC/EIP/CC/PN-RJ-V10 nel control cabinet integrato mini, come mostrato nella figura.
Figura 17.2-1 Installazione Scheda FRH-PCIeN-EC/EIP/CC/PN-RJ-V10

Figura 17.2-2 Porte di Rete Scheda FRH-PCIeN-EC/EIP/CC/PN-RJ-V10
Il cablaggio tra il control cabinet del robot e il PLC è mostrato nelle figure seguenti.

Figura 17.2-3 Schema di Cablaggio Control Cabinet & PLC Mitsubishi

Figura 17.2-4 Schema di Cablaggio Control Cabinet & PLC Siemens

Figura 17.2-5 Schema di Cablaggio Control Cabinet & PLC Omron
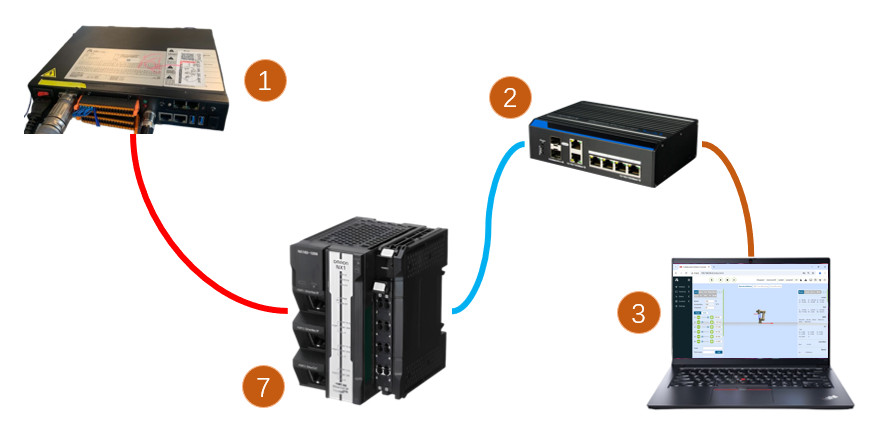
Figura 17.2-6 Schema di Cablaggio Control Cabinet & PLC Inovance (Easy Series)
Nota
1: Control cabinet robot (porta di rete scheda); 2: Switch; 3: PC portatile; 4: PLC Mitsubishi (porta CC-Link IEF Basic); 5: PLC Siemens (porta Profinet); 6: PLC Omron (porta Ethernet/IP); 7: PLC Inovance Easy (porta EtherCAT);
Importante
Quando il protocollo è commutato su bus EtherCAT, le porte di rete della scheda devono essere distinte tra EtherCAT_IN e EtherCAT_OUT. In questo caso, la porta EtherCAT del PLC Omron deve essere collegata direttamente alla porta EtherCAT_IN della scheda tramite un cavo di rete.
18.2.2. Setup Hardware Scheda FRJ-PCIeN
Installare la scheda nel control cabinet integrato mini, come mostrato nella figura.

Figura 17.2-7 Porte di Rete Scheda FRJ-PCIeN
Il cablaggio tra il control cabinet del robot e il PLC è mostrato nelle figure seguenti.
Figura 17.2-8 Schema di Cablaggio Control Cabinet & PLC Mitsubishi
Figura 17.2-9 Schema di Cablaggio Control Cabinet & PLC Siemens
Figura 17.2-10 Schema di Cablaggio Control Cabinet & PLC Inovance (Ethernet/IP)
Nota
1: Control cabinet robot (porta di rete scheda); 2: Switch; 3: PC portatile; 4: PLC Mitsubishi (porta CC-Link IEF Basic); 5: PLC Siemens (porta Profinet); 6: PLC Inovance (porta Ethernet/IP);
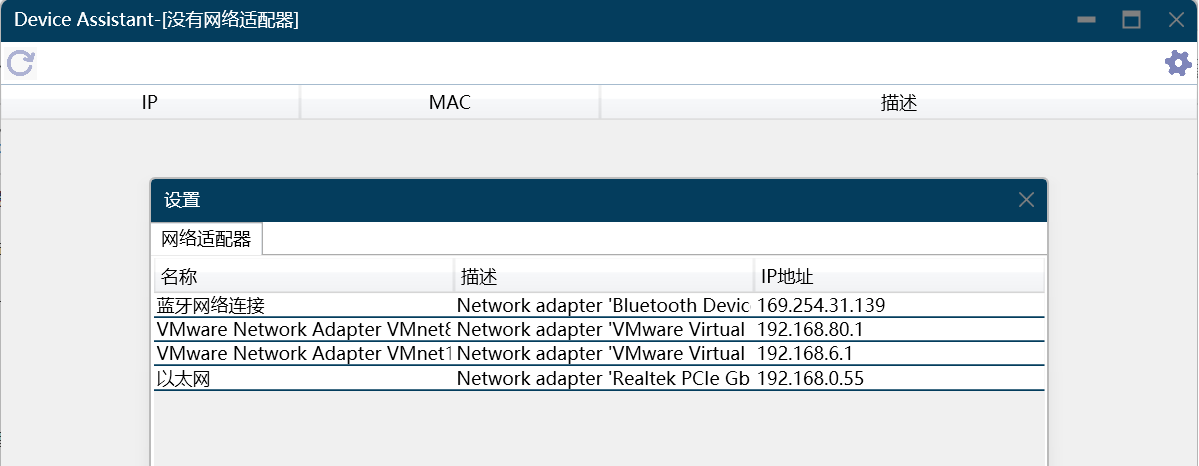
18.2.2.1. Aggiornamento del Firmware della Scheda FRJ-PCIeN-EIP/CC/PN-RJ-V10
Quando si cambia protocollo sulla scheda, è necessario eseguire un aggiornamento del firmware. Durante l’aggiornamento del firmware, l’indirizzo IP della scheda e l’indirizzo IP del PC portatile devono essere configurati sulla stessa sottorete. Quindi, aprire il software «Gateway Tool Set» -> selezionare il dispositivo scheda di rete del PC da connettere -> fare clic sul pulsante «Start» nell’angolo in basso a destra -> fare clic sul pulsante «Cerca» nell’angolo in alto a destra per cercare il dispositivo scheda.
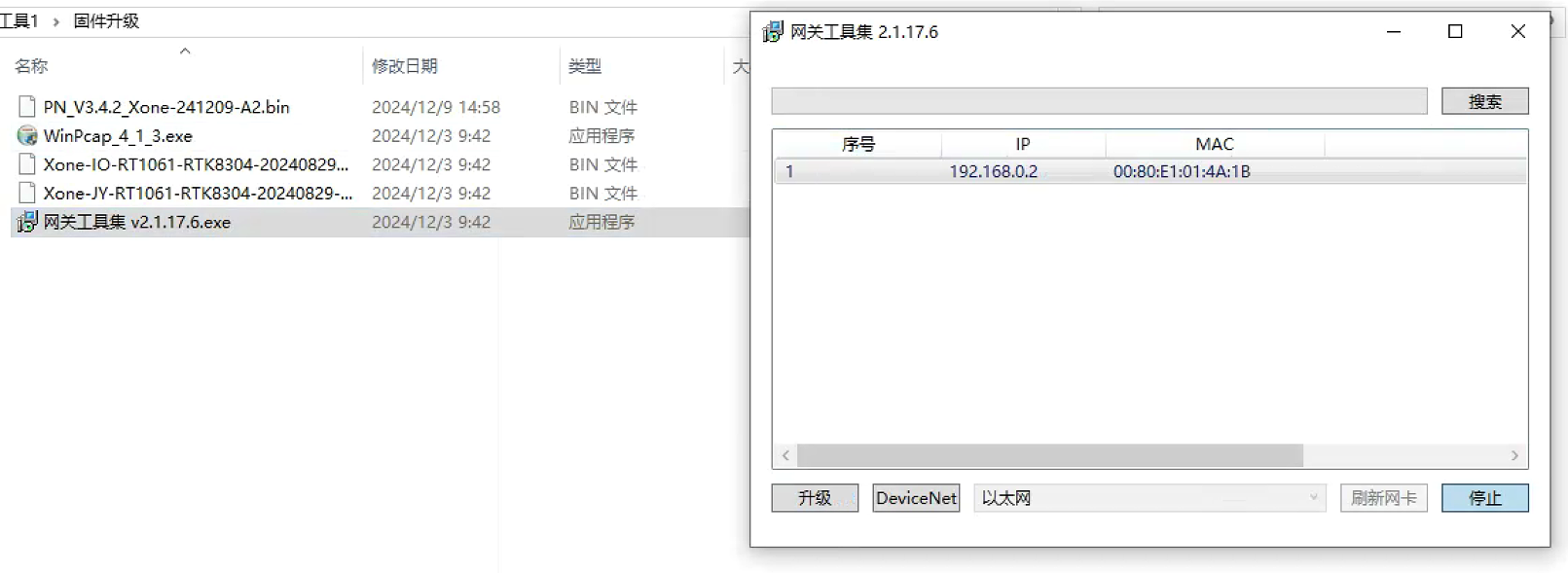
Figura 17.2-11 Collegamento Dispositivo Scheda
Fare clic sul pulsante «Upgrade» in basso a sinistra -> selezionare il dispositivo scheda -> fare clic sul pulsante «…» in alto a destra, selezionare il firmware del protocollo richiesto -> fare clic sul pulsante «Upgrade», attendere il completamento dell’aggiornamento del firmware.
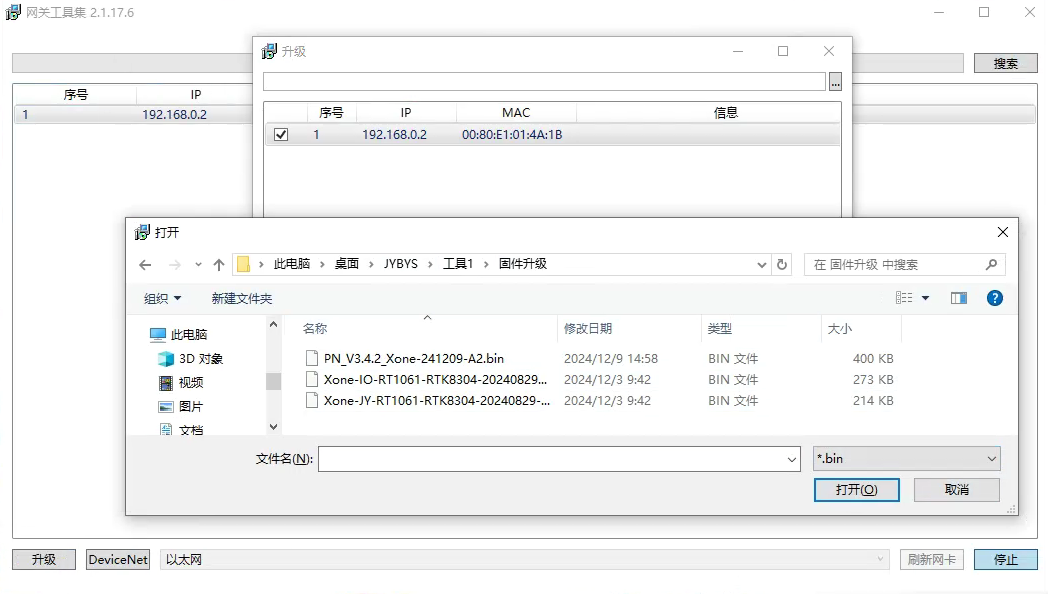
Figura 17.2-12 Cambio Protocollo Scheda
Nota
Dopo il cambio di protocollo della scheda, l’indirizzo IP della scheda cambierà, come dettagliato nella tabella seguente.
Tabella 17.2-1 Indirizzi IP Scheda
Protocollo |
Indirizzo IP |
|---|---|
CC-Link IEF Basic |
192.168.0.113 |
Ethernet/IP |
192.168.0.112 |
Profinet |
192.168.0.2 |
Quando il protocollo è configurato come CC-Link IEF Basic, il controller modificherà l’IP della scheda in «192.168.0.113».
Quando il protocollo è configurato come Ethernet/IP, il controller modificherà l’IP della scheda in «192.168.0.112».
Quando il protocollo è commutato su Profinet e il nome del dispositivo slave corrisponde a quello del master, il master configurerà automaticamente l’indirizzo IP dello slave.
18.2.2.2. Aggiornamento del Firmware della Scheda FRJ-PCIeN-EC-RJ-V10
Inserire l’URL 192.169.58.2 per accedere all’interfaccia del robot, quindi fare clic su «Impostazioni iniziali» -> «Periferiche» -> «Comunicazione scheda» per ottenere il numero di versione del firmware della scheda FRJ-PCIeN-EC-RJ-V10. Selezionare il file bin da aggiornare, fare clic su Carica, attendere il completamento dell’aggiornamento del firmware, quindi riavviare il box di controllo.
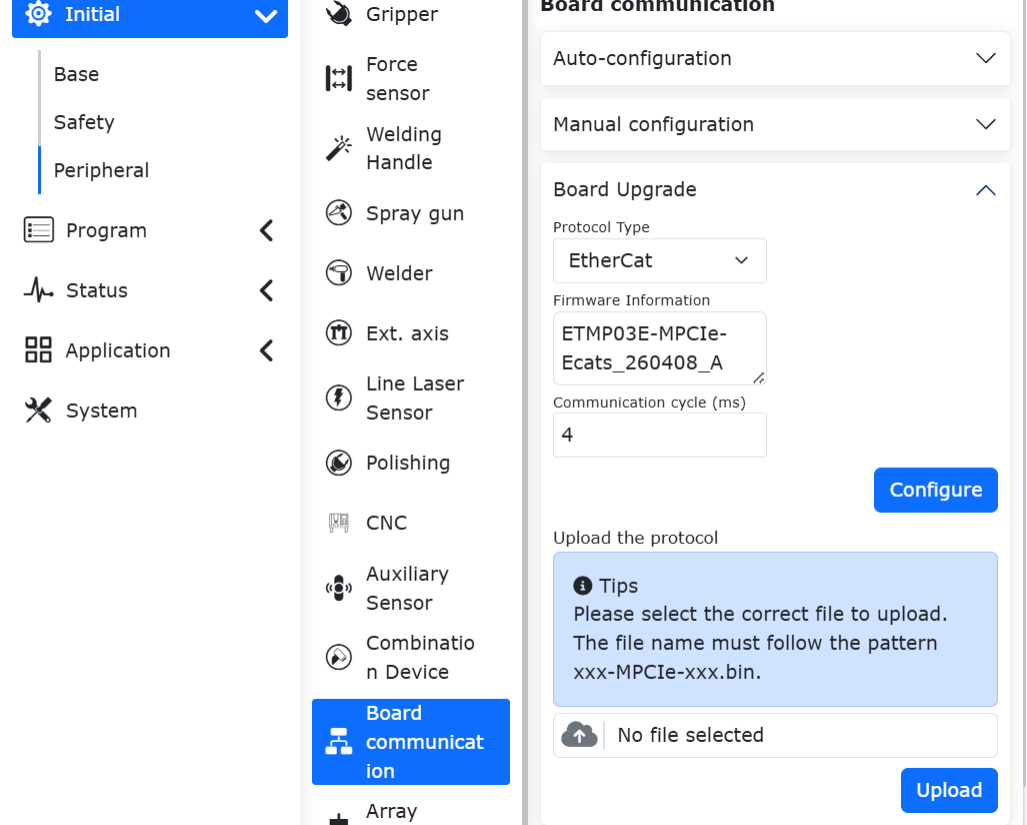
Figura 17.2-13 Aggiornamento del firmware della scheda
Nota
Per aggiornare il firmware della scheda FRJ-PCIeN-EC-RJ-V10, è necessario scaricare il protocollo aperto in esecuzione.
18.2.3. Setup Software
Nel browser, inserire l’IP 192.168.58.2, nome utente admin, password 123, fare clic su «Login» per accedere all’interfaccia Web del control cabinet robot.
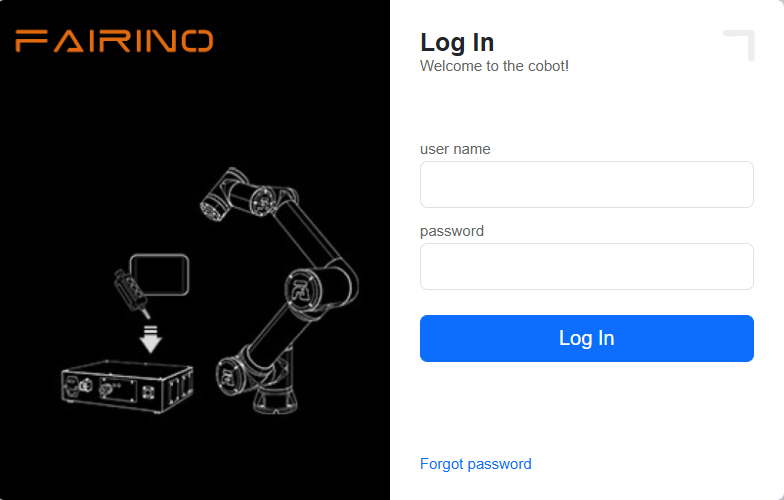
Figura 17.2-14 Interfaccia di Accesso Web
Fare clic su Impostazioni Sistema -> Interfaccia Informazioni, fare clic sul pulsante Aggiornamento Software, selezionare il file software.tar.gz, caricare il pacchetto di aggiornamento.
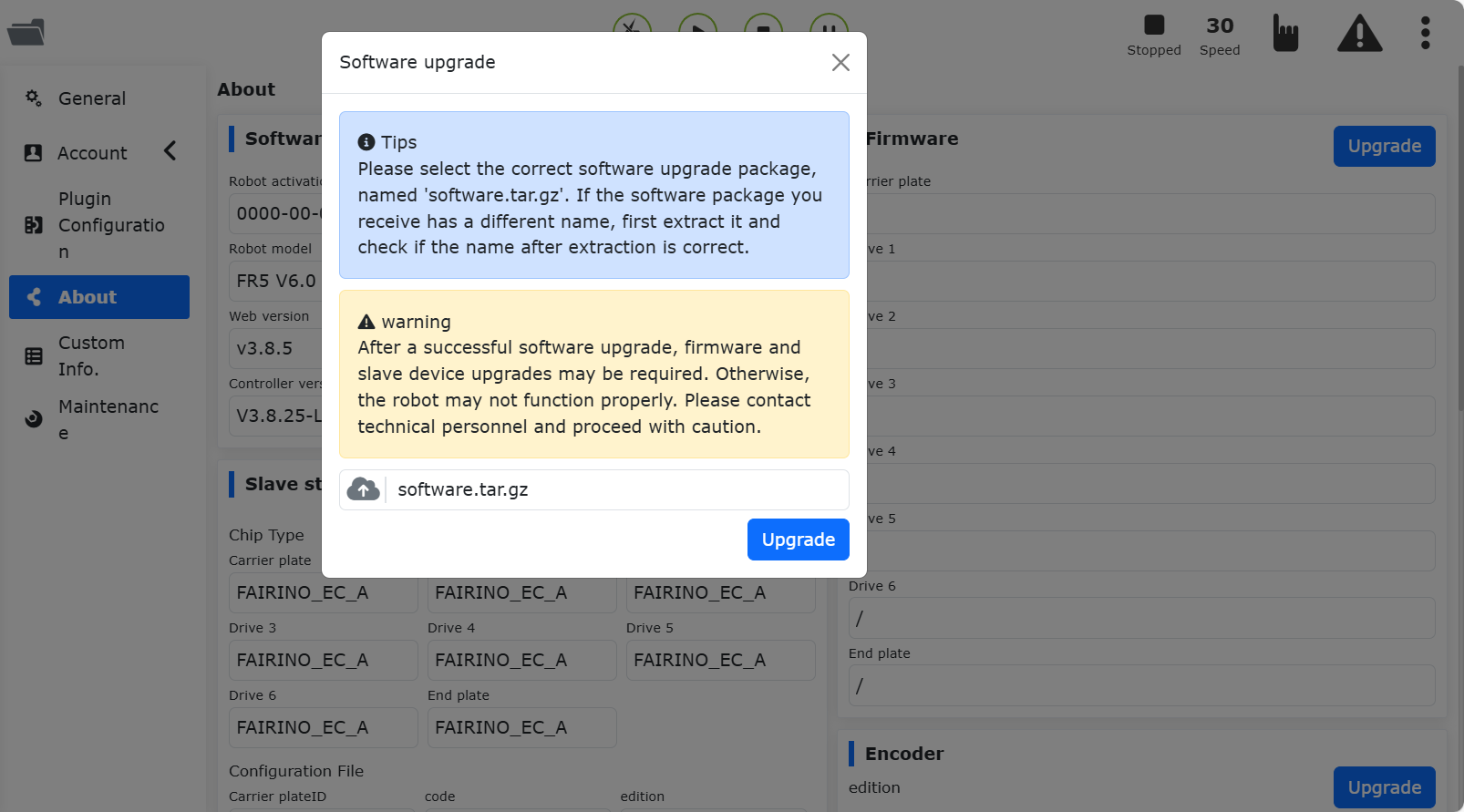
Figura 17.2-15 Aggiornamento Software
Nota
La versione web del control cabinet QX deve essere V3.8.0 o superiore, la versione web del control cabinet LA deve essere V3.8.0 o superiore.
Fare clic sul pulsante di espansione in alto a destra, passare da «Modalità Locale» a «Modalità Remota».
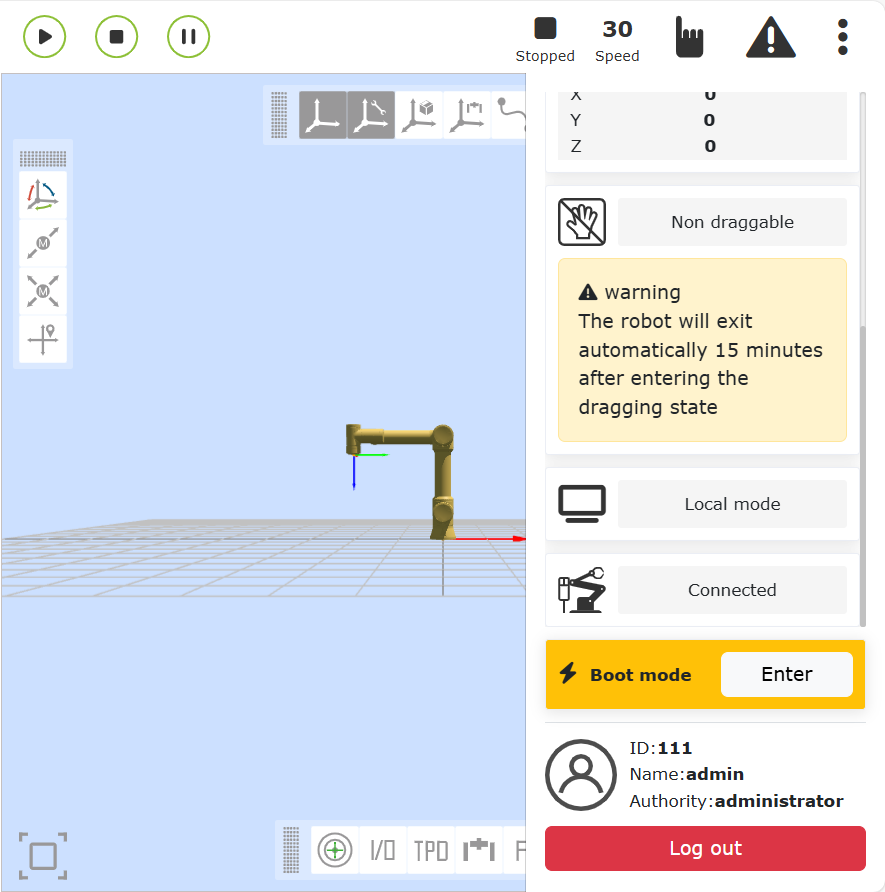
Figura 17.2-16 Passaggio a Modalità Remota
Selezionare il protocollo slave del controller e la necessità della funzione di avvio automatico, fare clic sul pulsante «Imposta». Nota: per cambiare protocollo, è necessario prima fare clic sul pulsante «Rimuovi», quindi configurare un altro protocollo.
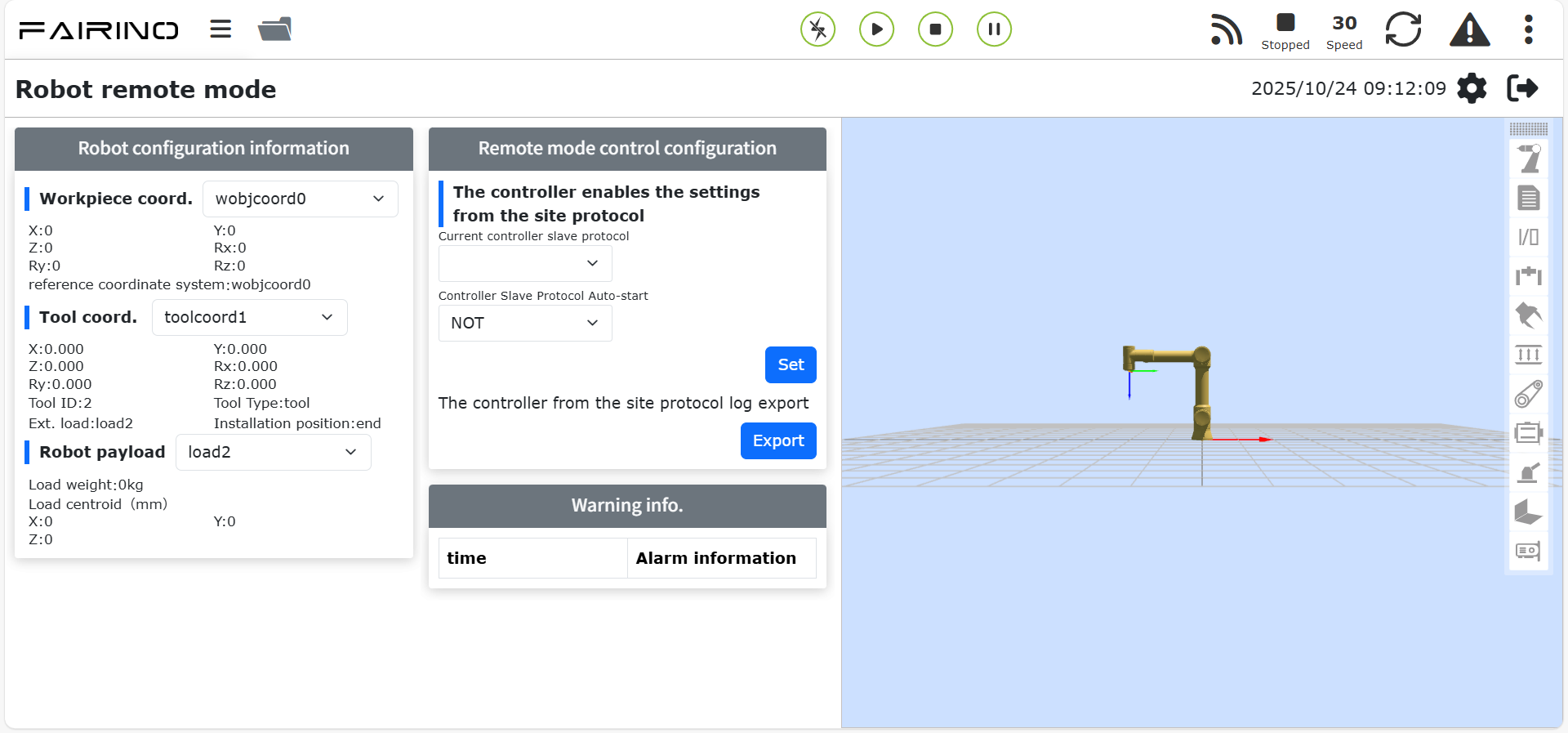
Figura 17.2-17 Configurazione Protocollo Comunicazione
Nota
Per cambiare protocollo, è necessario riavviare il control cabinet prima di configurare il nuovo protocollo.
18.2.4. Setup Ambiente PLC
L’ambiente di test configurato per implementare le istruzioni slave dei vari protocolli è mostrato nella tabella seguente, inclusi i modelli PLC utilizzati, le versioni firmware e il software di test.
Protocollo |
Marca |
Modello |
Firmware |
Software |
|---|---|---|---|---|
Profinet |
Siemens |
CPU 1515-2 PN |
6ES75152AM020AB0 |
TIA Portal V17 |
CC-Link IEF Basic |
Mitsubishi |
FX5S-30TR/DS |
30MR/ES V1.3 |
GX Works3 V1.097B |
Ethernet/IP |
Omron |
MX102-1100 |
V1.3 |
Sysmac Studio V1.50 |
EtherCAT |
Inovance |
Easy521-0808TN |
/ |
AutoShop 4.10.2.4 |
18.2.4.1. Siemens Profinet
Importazione File GSD (File XML)
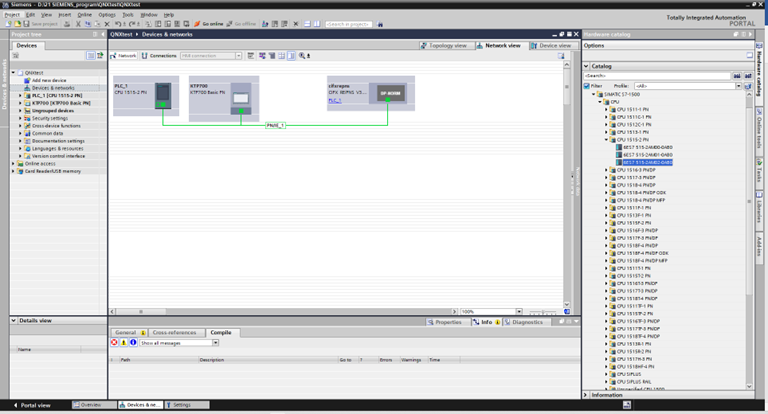
Aprire il software di programmazione Siemens TIA Portal V17, creare un nuovo progetto PLC, selezionare «Dispositivi e Rete», nel «Catalogo Hardware» a destra, fare doppio clic su 6ES7 515-2AM02-0AB0 per aggiungere il modulo PLC.
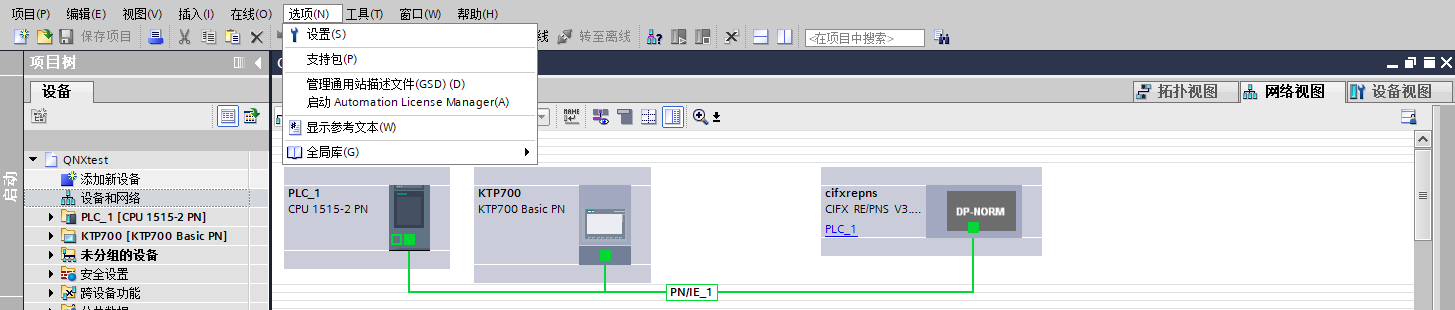
Nel software TIA PORTAL, selezionare «Opzioni» -> «Gestisci File di Descrizione Stazione Generica (GSD)» dalla barra dei menu per installare o rimuovere file GSD già installati.
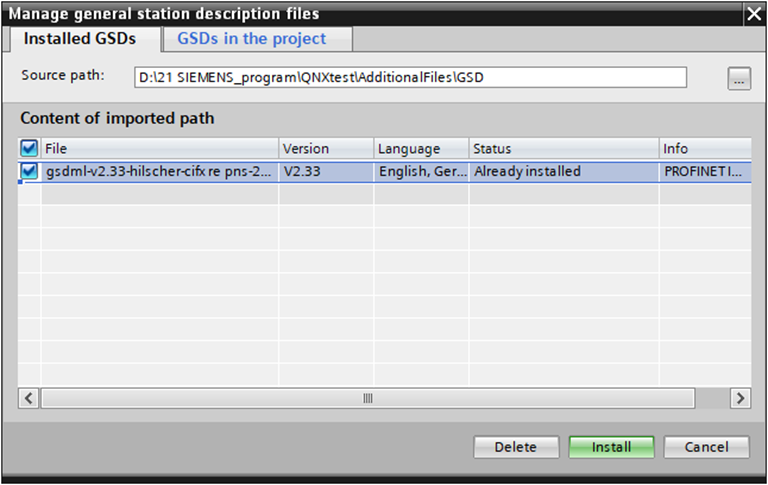
Prendendo come esempio l’installazione del file GSD per la scheda FRH-PCIeN-EC/EIP/CC/PN-RJ-V10, selezionare «Gestisci File di Descrizione Stazione Generica (GSD)» come sopra, apparirà la finestra «Gestisci File di Descrizione Stazione Generica».
Da «Percorso Sorgente» selezionare la cartella contenente il file GSD da installare, dalla lista dei file GSD visualizzata selezionare uno o più file da installare, fare clic sul pulsante «Installa». Come mostrato nella figura sottostante.
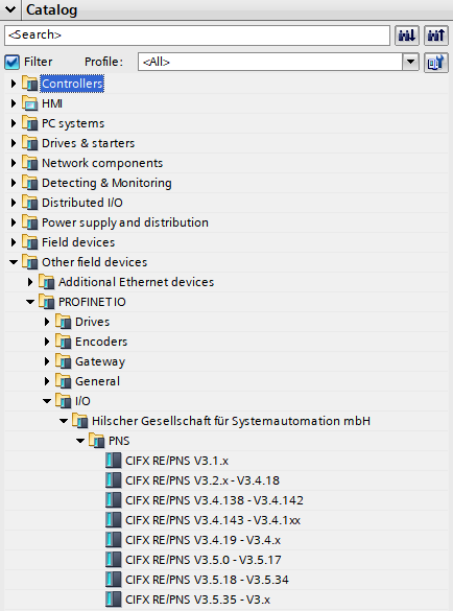
Dopo l’installazione riuscita, il dispositivo del file GSD installato può essere trovato nel catalogo hardware, sotto Altri Dispositivi sul Campo, come mostrato nella figura sottostante.
Esecuzione Programma
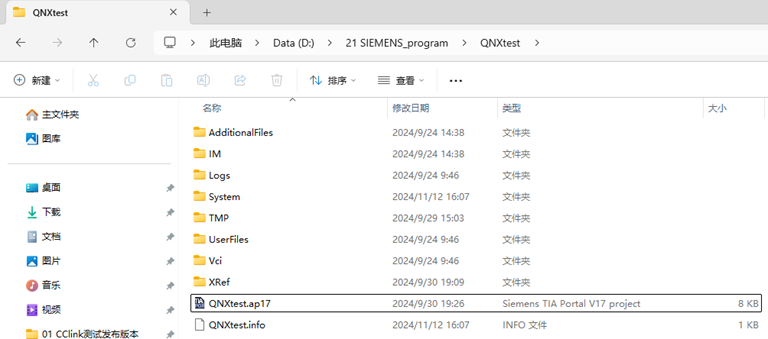
Aprire il progetto «QNXtest».
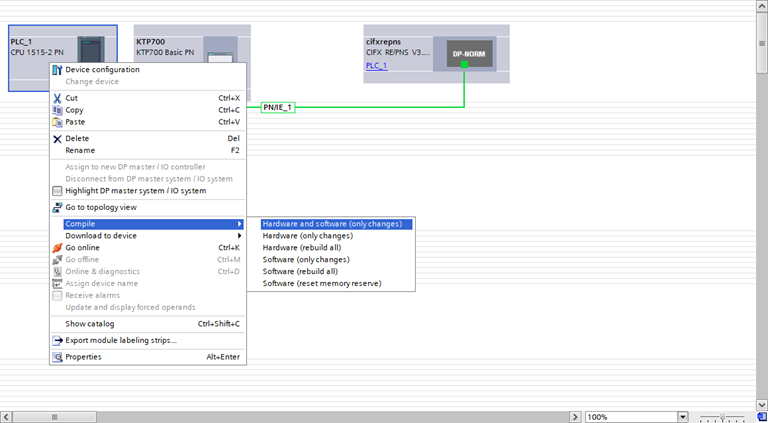
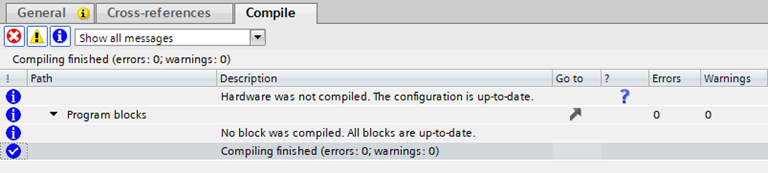
Compilare il programma: nel progetto a sinistra, fare doppio clic per entrare in «Dispositivi e Rete», fare clic destro sul modulo «PLC_1», selezionare Compila dal menu a discesa, fare clic su «Hardware e Software (solo modifiche)». Dopo la compilazione, verrà visualizzato «Compilazione Completata» nella parte inferiore della vista software.
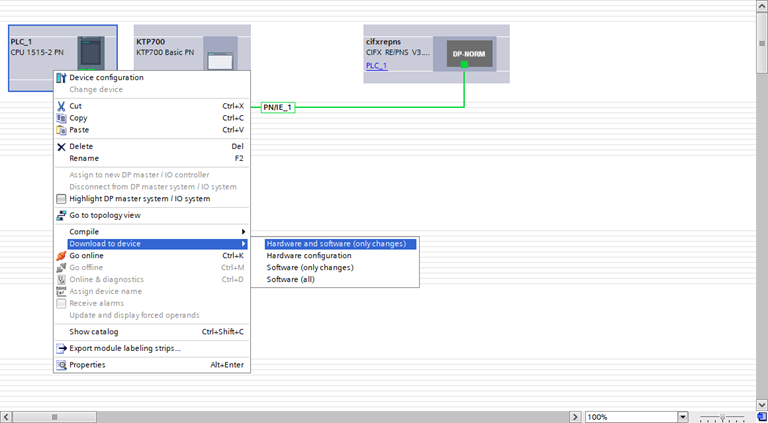
Scaricare il programma sul dispositivo: nel progetto a sinistra, fare doppio clic per entrare in «Dispositivi e Rete», fare clic destro sul modulo «PLC_1», selezionare «Scarica su dispositivo» dal menu a discesa, fare clic su «Hardware e Software (solo modifiche)».
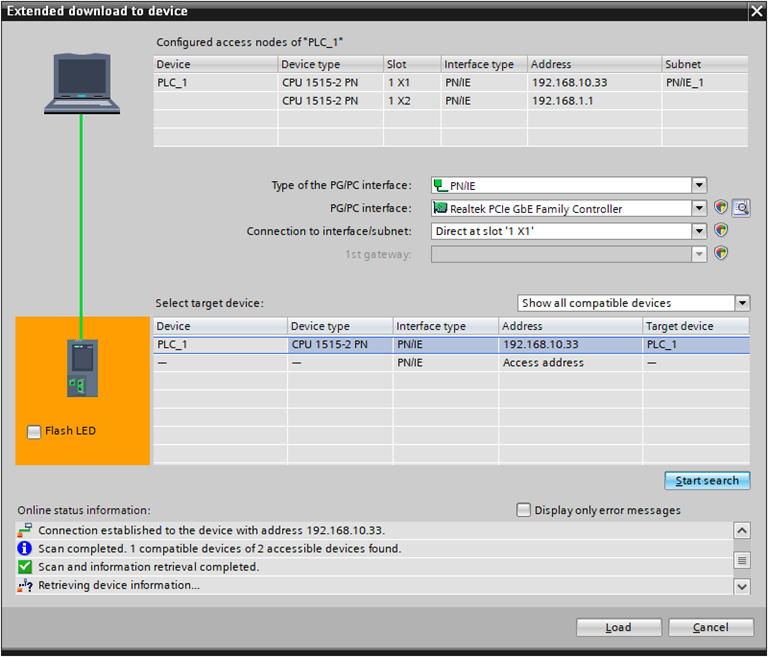
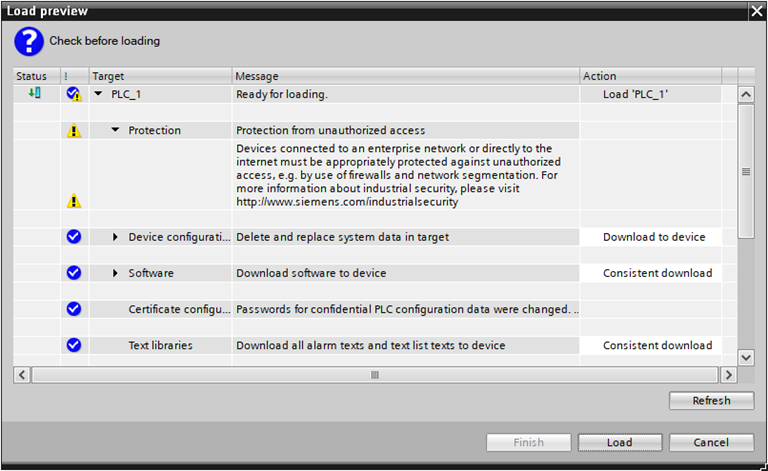
Cercare e scaricare sul dispositivo: dopo la finestra pop-up, configurare il tipo di interfaccia PG/PC come mostrato di seguito, fare clic su Inizia Ricerca, selezionare il dispositivo su cui scaricare il programma, fare clic su Scarica.
18.2.4.2. Mitsubishi CC-Link IEF Basic
Impostazioni CC-Link IEF Basic
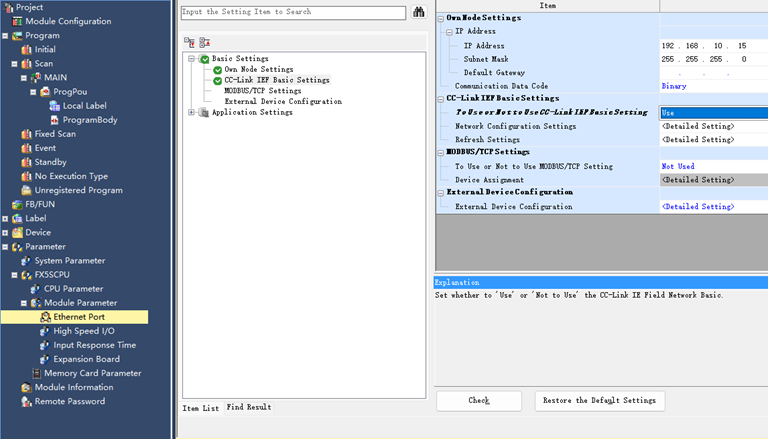
Attivare l’uso di CC-Link IEF Basic: dal menu di navigazione a sinistra selezionare «Porta Ethernet», impostare l’indirizzo IP del PLC, assicurarsi che sia nella stessa sottorete dell’indirizzo della scheda FRH-PCIeN-EC/EIP/CC/PN-RJ-V10. Fare clic su «Uso CC-Link IEF Basic», selezionare «Utilizza».
Impostazioni configurazione rete CC-Link IEF Basic: sempre in Impostazioni CC-Link IEF Basic, selezionare «Impostazioni Configurazione Rete», selezionare il modulo CIFX Digital I/O della scheda FRH-PCIeN-EC/EIP/CC/PN-RJ-V10. Trascinarlo nell’area in basso a sinistra della vista per completare la configurazione hardware.
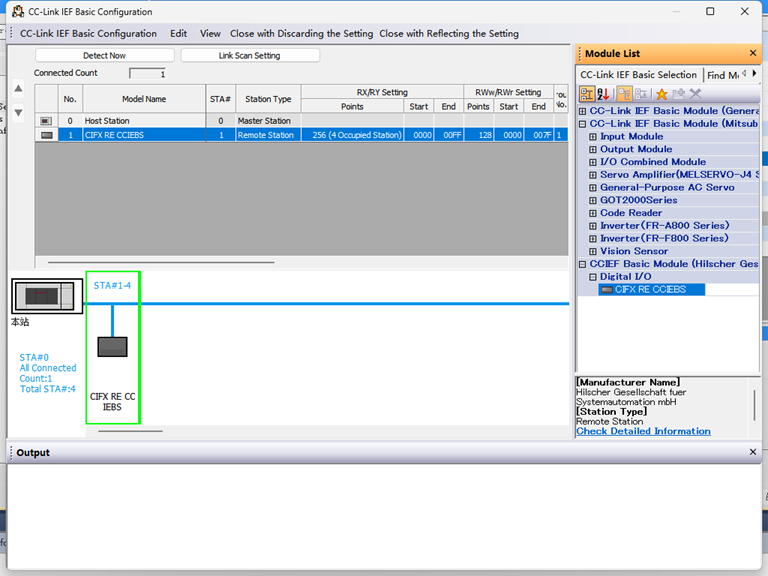
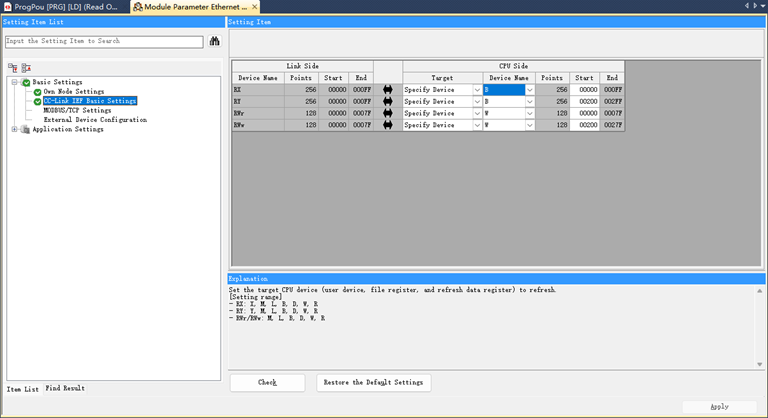
Impostazioni refresh CC-Link IEF Basic: sempre in Impostazioni CC-Link IEF Basic, fare clic su Impostazioni Refresh, impostazioni trasmissione personalizzate: 256 byte ricezione, 256 byte trasmissione.
Download Programma
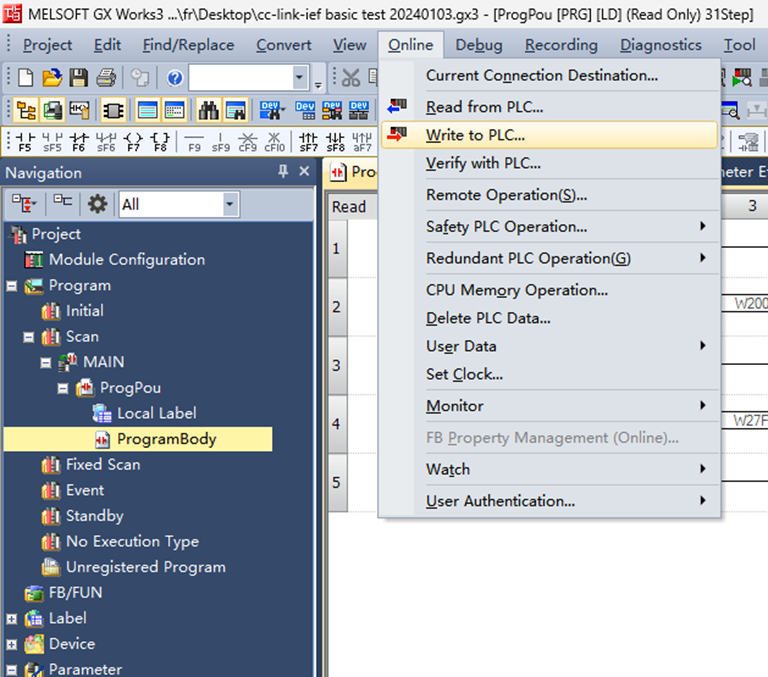
Dopo aver aperto il programma di test, fare clic su «Online» -> «Scrivi su Controllore Programmable» per accedere all’interfaccia di download.
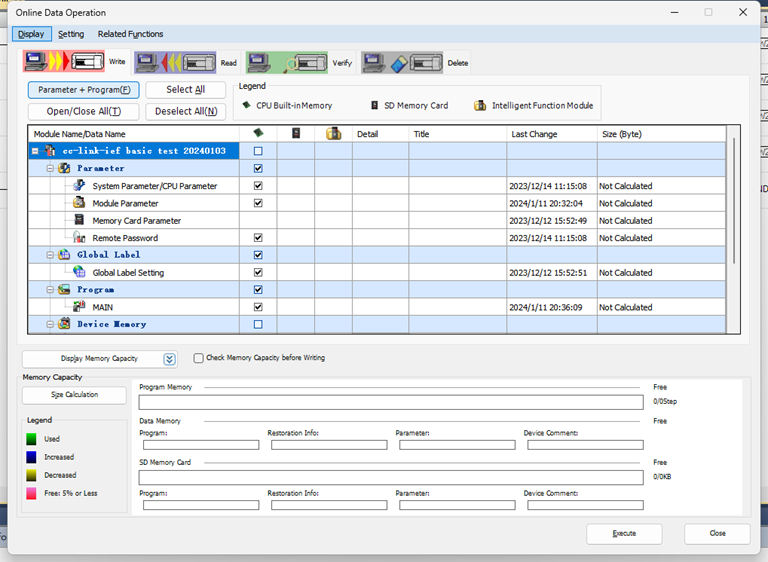
Dopo aver aperto l’interfaccia di download, fare clic su «Parametri + Programma» in alto a sinistra, quindi fare clic su «Esegui» in basso a destra per eseguire il download, attendere il completamento.
18.2.4.3. Inovance EtherCAT
Importazione File XML
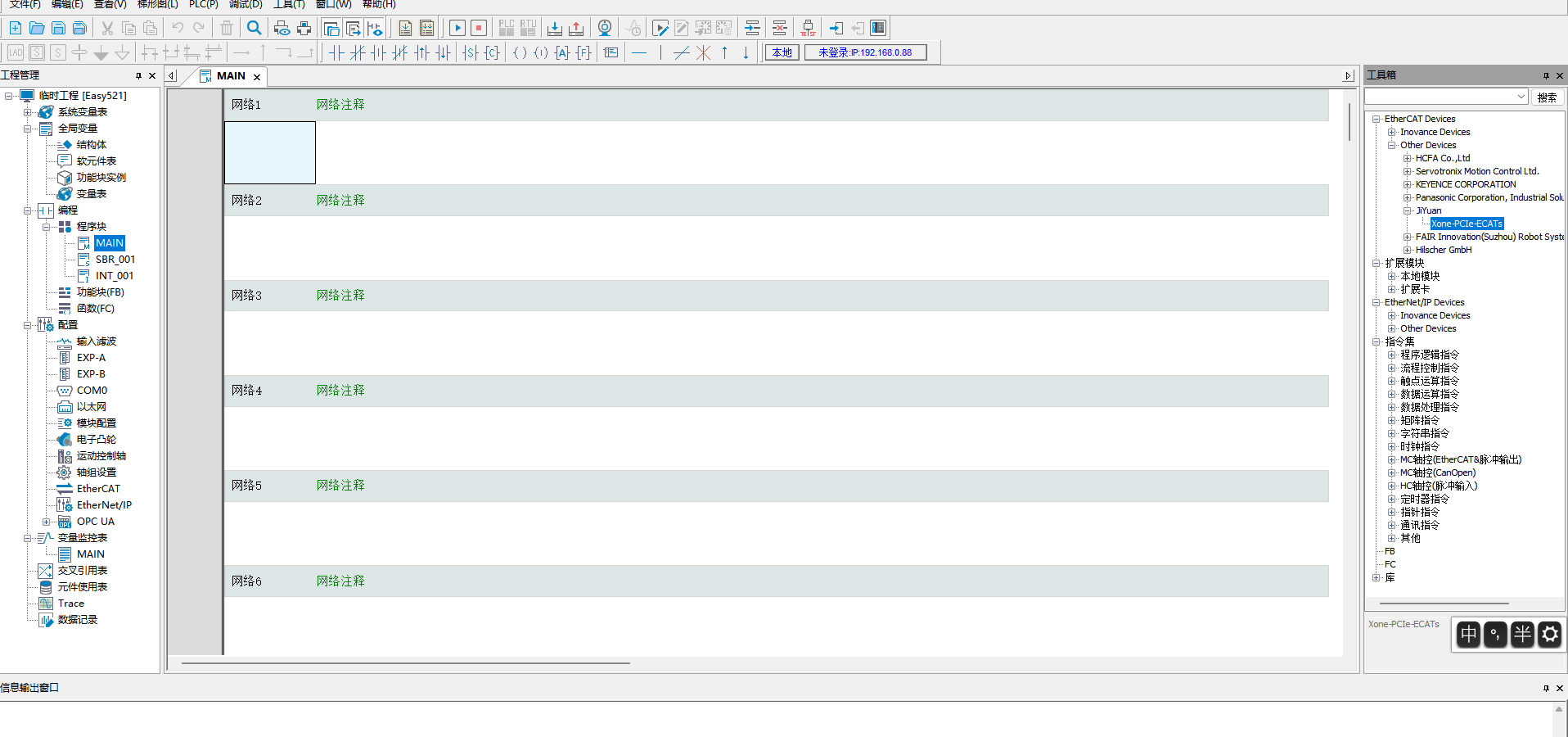
Aprire il software di programmazione Inovance AutoShop, creare un nuovo progetto PLC, nella barra degli strumenti a destra selezionare «Dispositivi EtherCAT»:
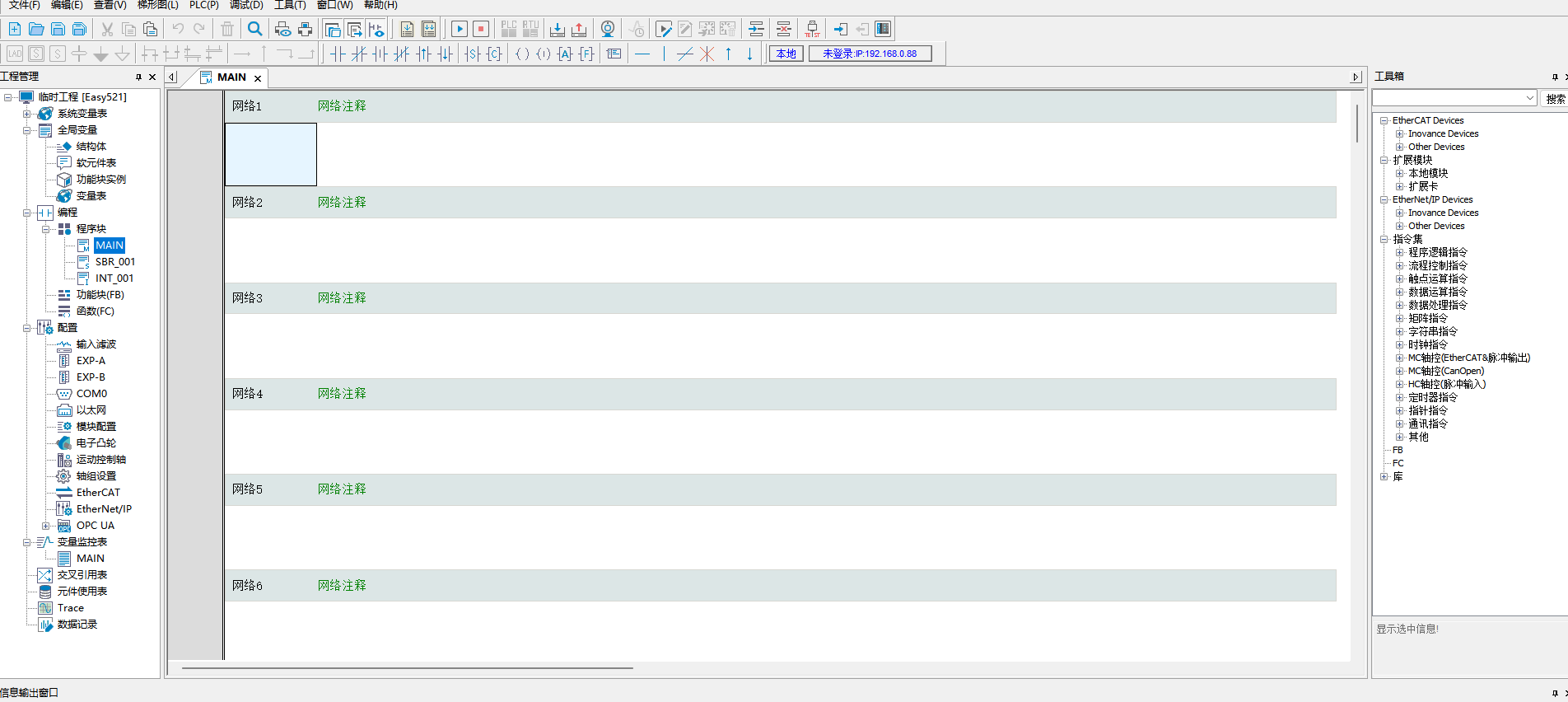
Fare clic sinistro su «Dispositivi EtherCAT», quindi clic destro per aprire la finestra di dialogo «Importa XML Dispositivo», confermare con clic sinistro, individuare la cartella contenente i file XML della scheda.
Dopo l’importazione riuscita, sotto la directory «Dispositivi EtherCAT» apparirà il nome della scheda. A questo punto, chiudere e riaprire il progetto per completare il processo di importazione del file XML.
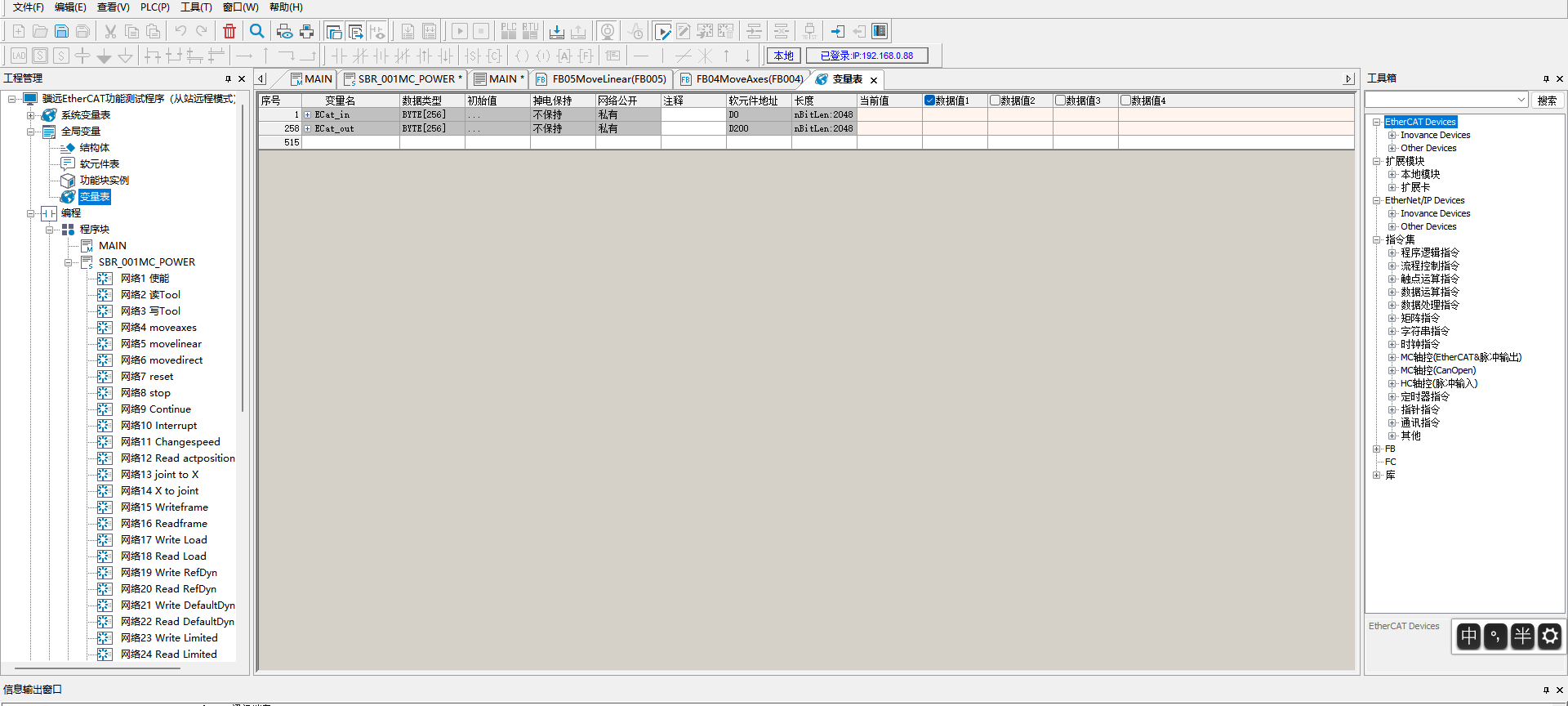
Configurazione Variabili
Nella barra degli strumenti a sinistra, fare doppio clic sulla tabella delle variabili, creare un array di input da 256 byte, indirizzo dispositivo soft D0. Creare un array di output da 256 byte, indirizzo dispositivo soft D200.
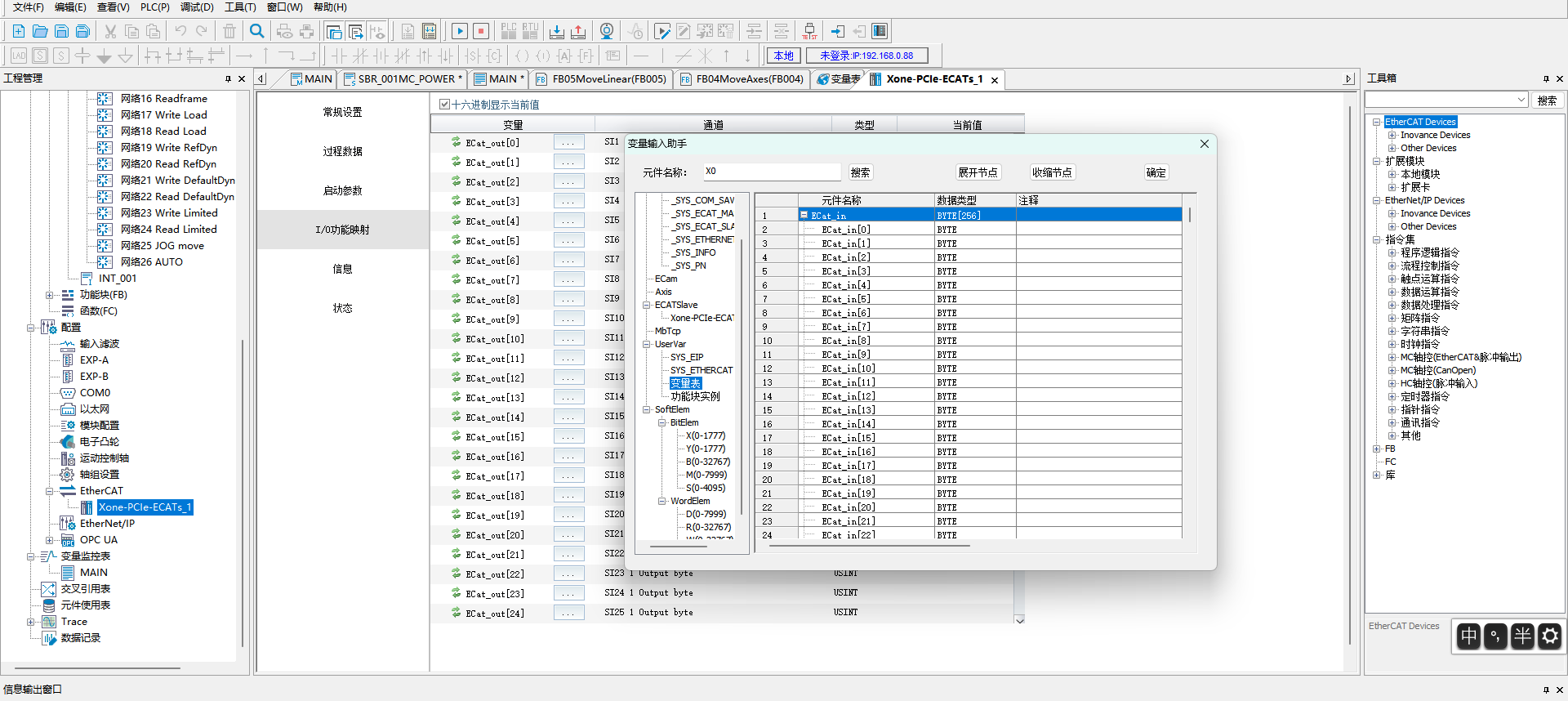
Nella barra degli strumenti a sinistra, sotto «EtherCAT», fare doppio clic su «Xone-PCIe-ECATs», nella finestra di dialogo che appare fare clic su «Mappatura Funzioni I/O», fare clic sul riquadro per associare l’indirizzo della variabile, nella finestra di dialogo fare clic su «Tabella Variabili», selezionare l’input/output corrispondente desiderato, fare clic su OK. Ripetere l’operazione per gli altri indirizzi in sequenza.
Download Programma
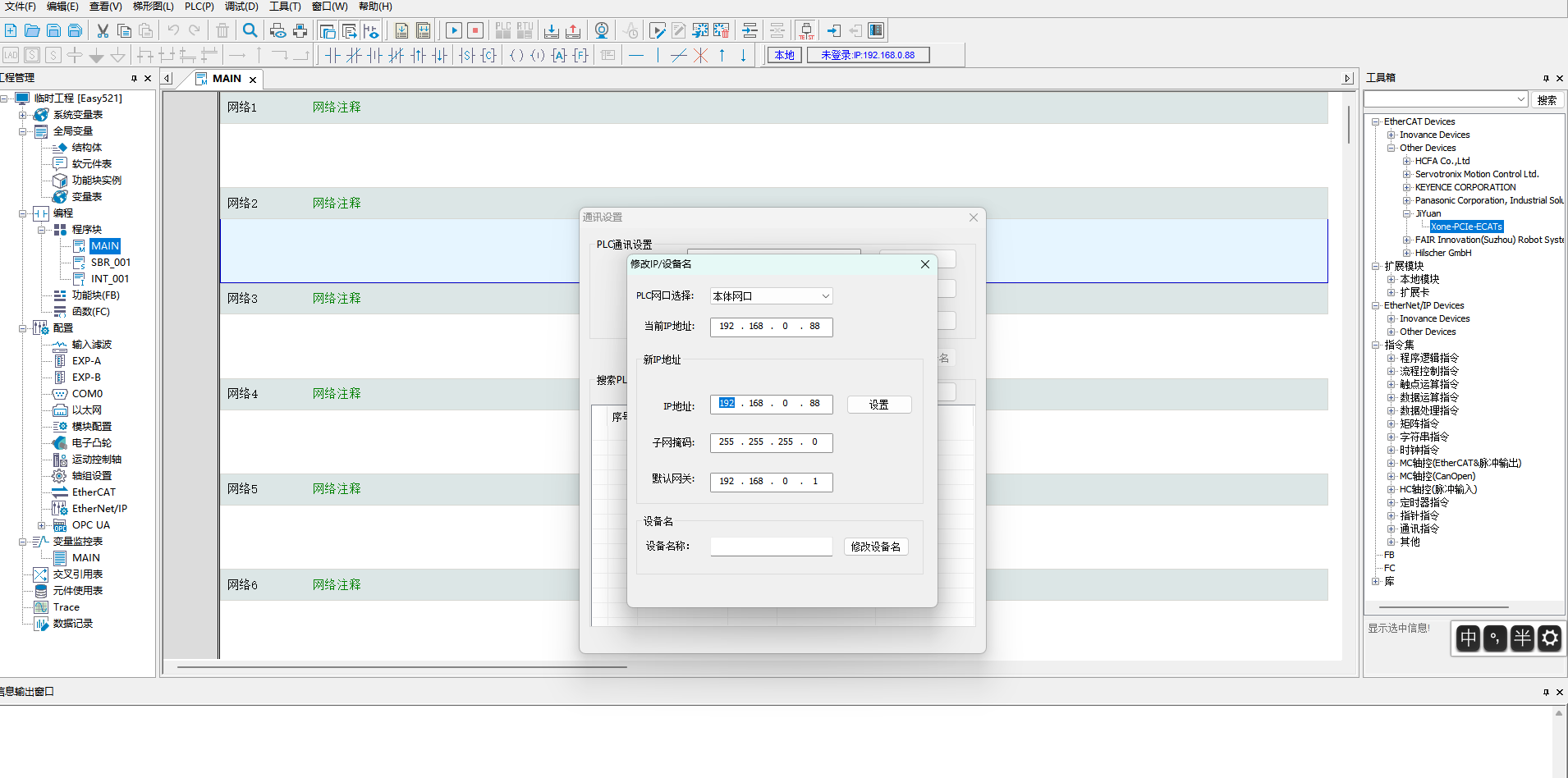
Aprire il programma di test, modificare l’indirizzo IP del PLC in «192.168.0.88», il default è «192.168.1.88».

Fare clic su «Modifica IP/Nome Dispositivo» per accedere all’interfaccia di impostazione IP, modificare l’indirizzo IP e il gateway in «192.168.0.88»:
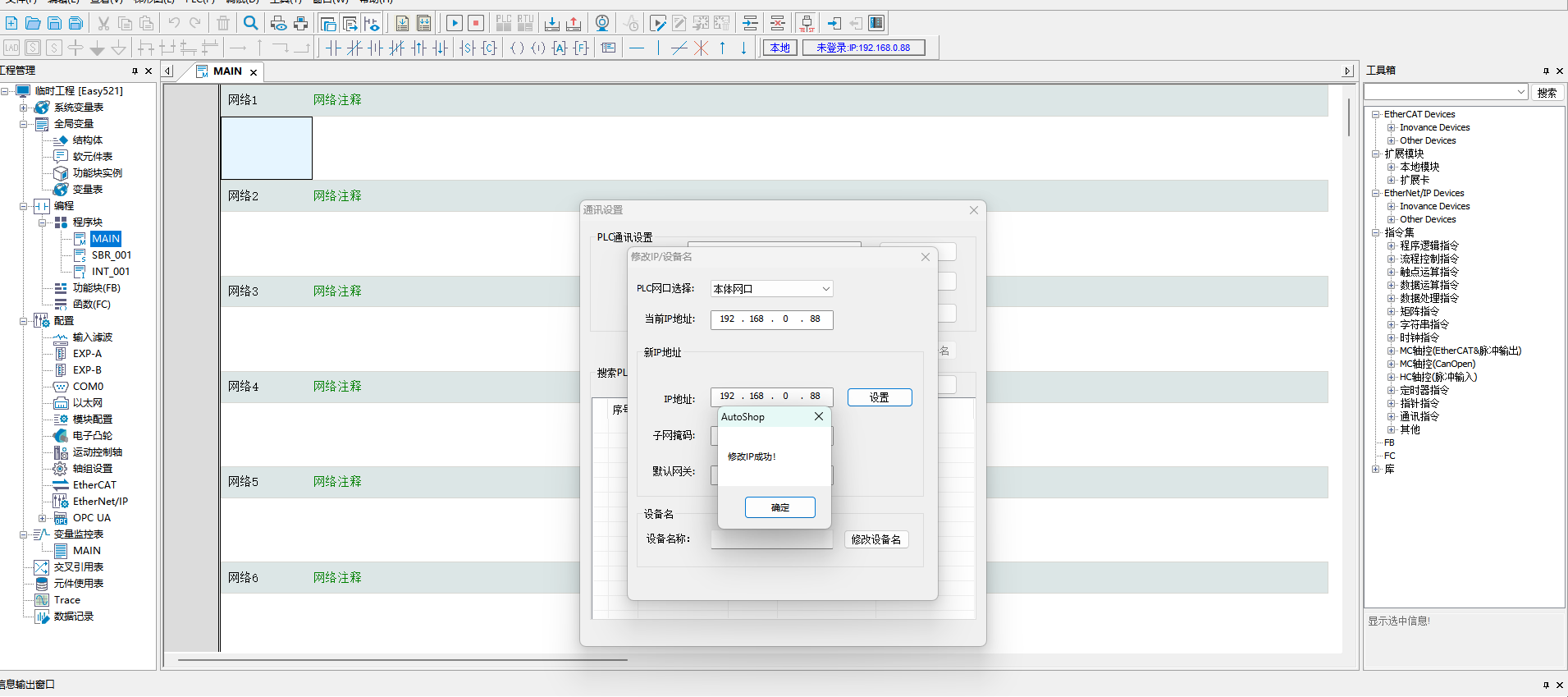
Fare clic su «Modifica IP», dopo la finestra di dialogo fare clic su «Sì» per confermare, l’indirizzo IP è stato modificato con successo.
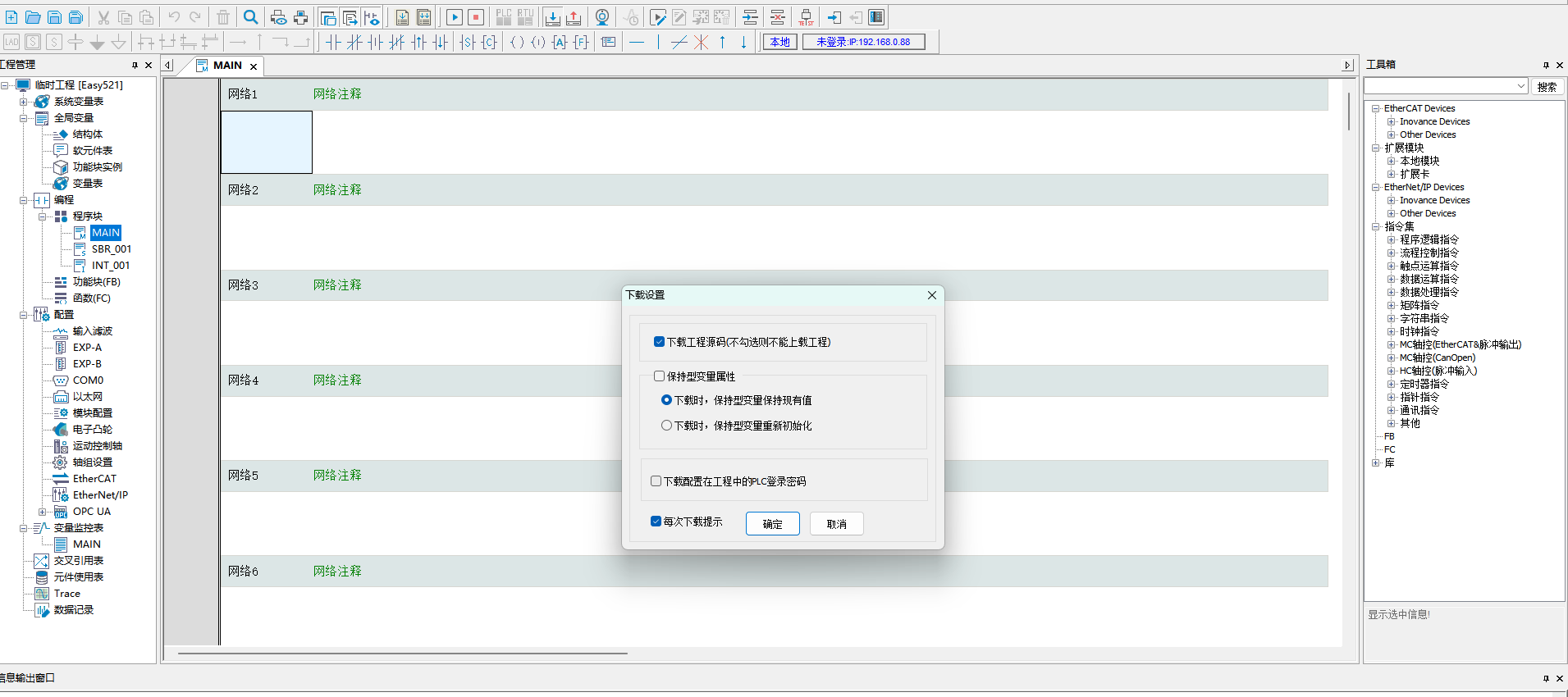
Comunicazione stabilita, scaricare il programma PLC.
18.2.5. Configurazione HMI (Simulazione CC-Link IEF Basic)
Dopo l’accesso all’interfaccia HMI, abilitare «Enable Task» per stabilire la connessione di comunicazione tra PLC e controller.
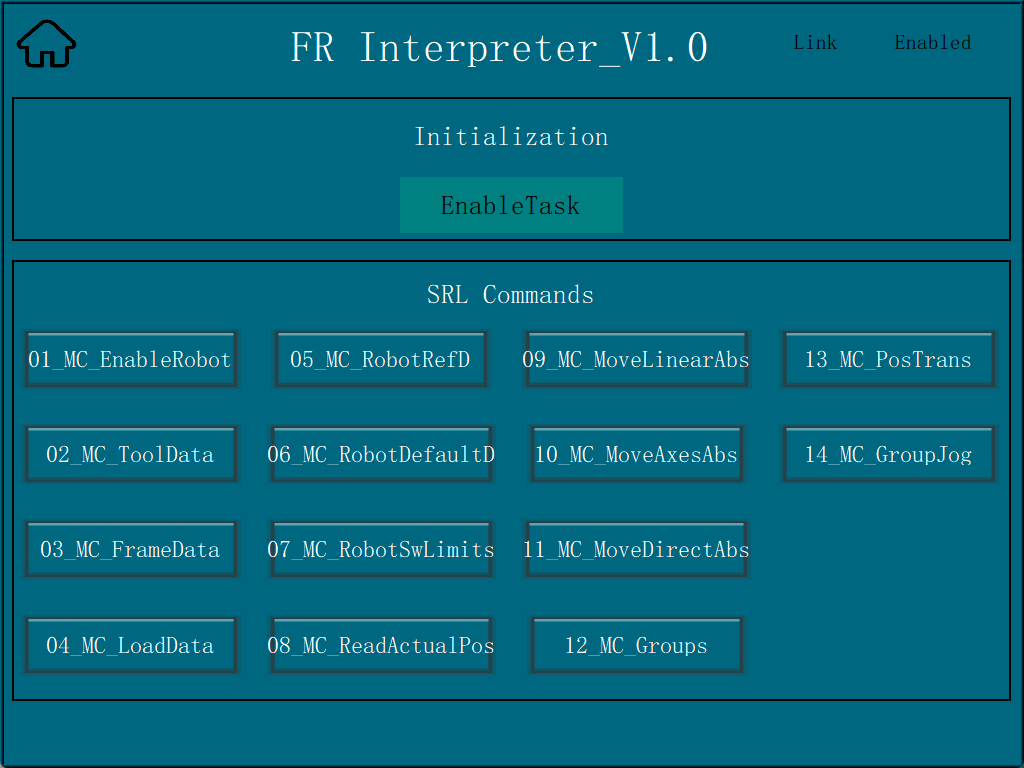
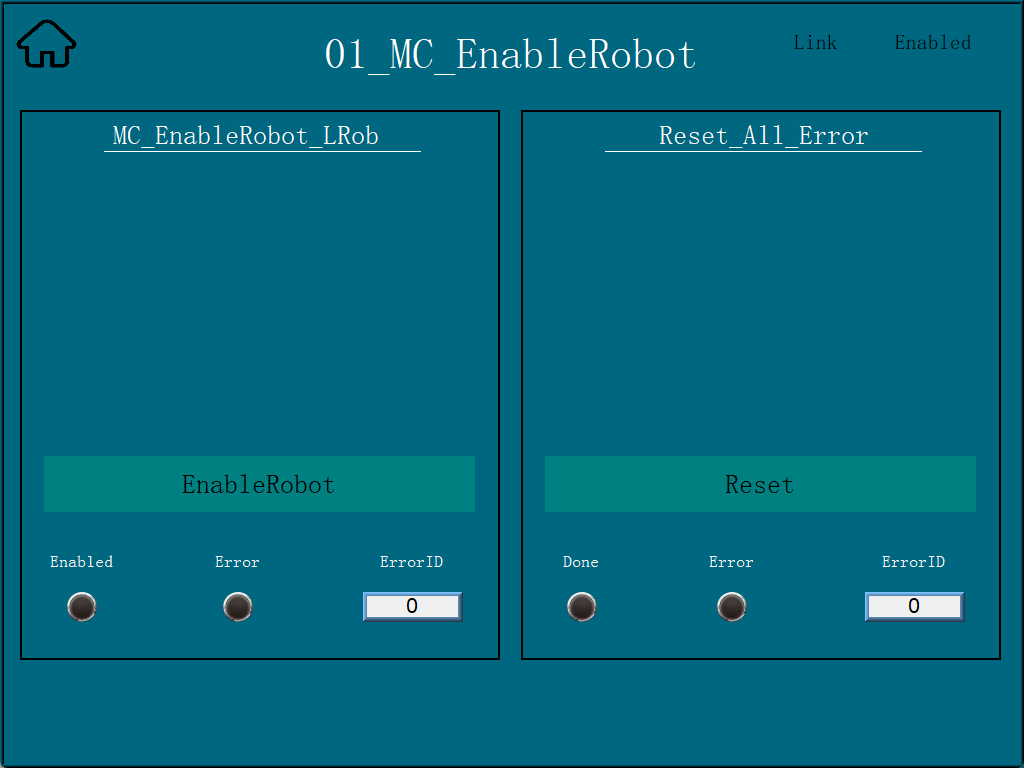
Fare clic sull’interfaccia 01_MC_EnableRobot, quindi fare clic su «EnableRobot» per abilitare il robot. Se durante l’uso si verificano errori, fare clic su «Reset» per ripristinare.
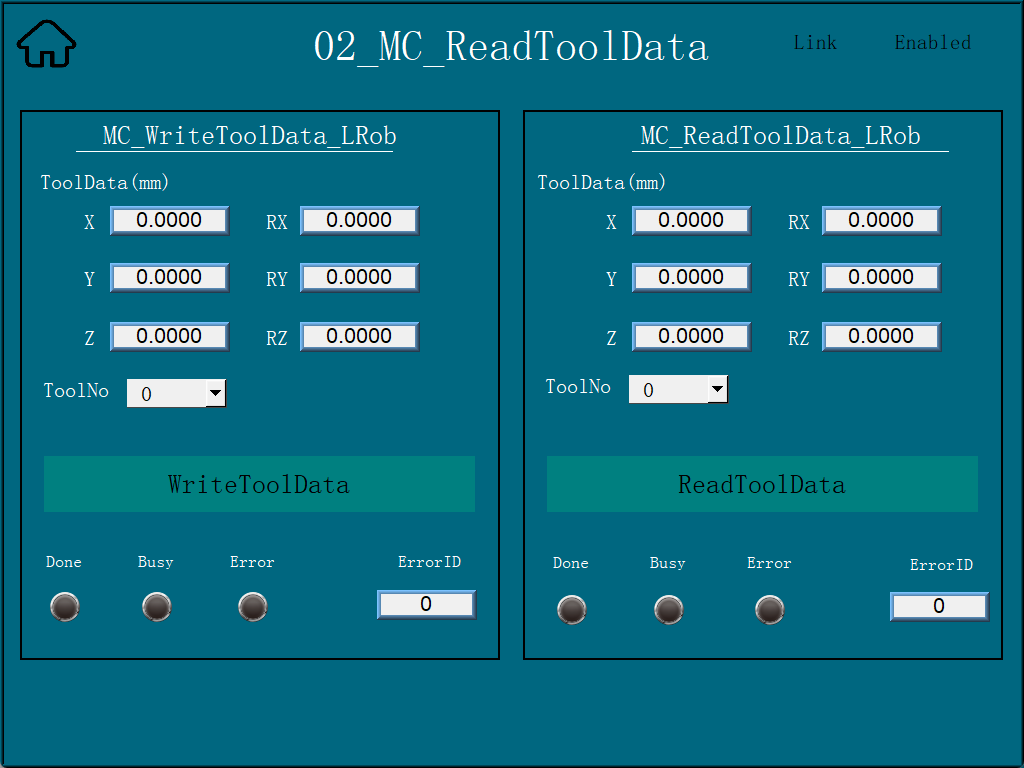
Fare clic su «02_MC_ToolData» per accedere all’interfaccia informazioni utensile. Inserire i parametri a sinistra e fare clic su WriteToolData per scrivere le informazioni utensile; a destra fare clic su ReadToolData per leggere le informazioni utensile esistenti.
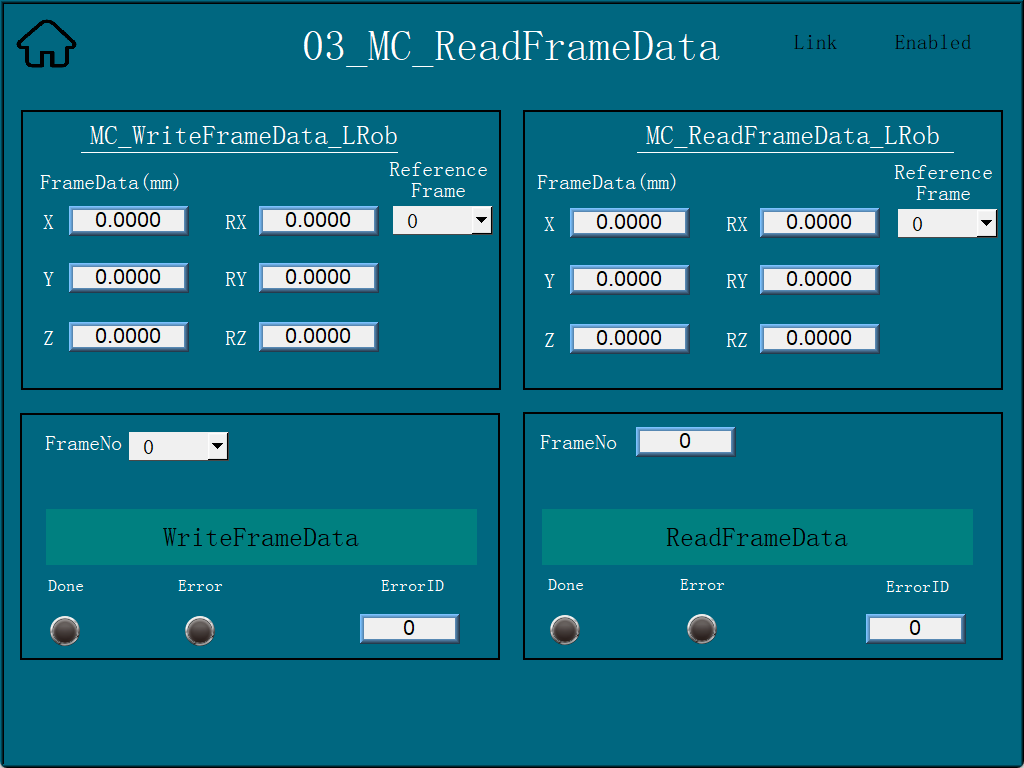
Fare clic su «03_MC_FrameData» per accedere all’interfaccia informazioni pezzo. Inserire i parametri a sinistra e fare clic su WriteFrameData per scrivere le informazioni pezzo; a destra fare clic su ReadFrameData per leggere le informazioni pezzo esistenti.
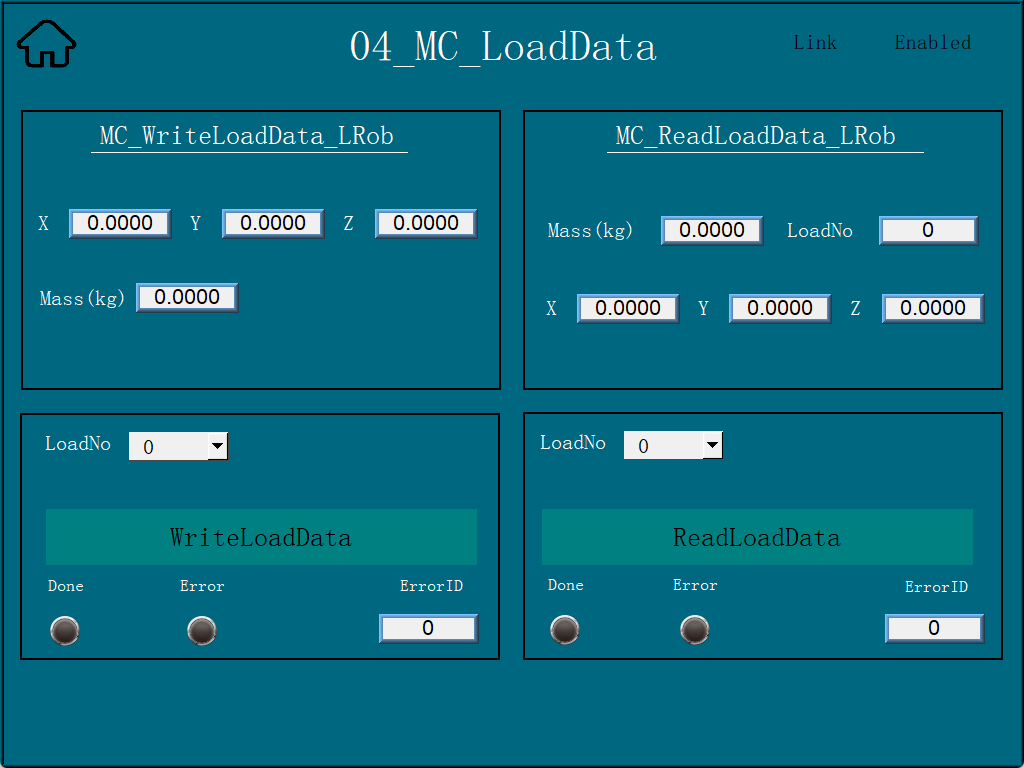
Fare clic su «04_MC_LoadData» per accedere all’interfaccia informazioni carico. Inserire i parametri a sinistra e fare clic su WriteLoadData per scrivere le informazioni carico; a destra fare clic su ReadLoadData per leggere le informazioni carico esistenti.
Fare clic su «05_MC_RobotReferenceDynamics» per accedere all’interfaccia velocità massima e accelerazione massima del robot. Inserire i parametri a sinistra e fare clic su WriteRobotRefD per scrivere le informazioni velocità e accelerazione massime; a destra fare clic su ReadRobotRefD per leggere le informazioni velocità e accelerazione massime esistenti.
Fare clic su «06_MC_Robot DefaultDynamics» per accedere all’interfaccia velocità predefinita e accelerazione predefinita del robot. Inserire i parametri a sinistra e fare clic su WriteRobotDefD per scrivere le informazioni velocità e accelerazione predefinite; a destra fare clic su ReadRobotDefD per leggere le informazioni velocità e accelerazione predefinite esistenti.
Fare clic su «07_MC_RobotSwLimits» per accedere all’interfaccia limiti di posizione. Inserire i valori dei parametri limite massimo e minimo a sinistra e fare clic su WriteRobotSwLimits per scrivere le informazioni parametri limite; a destra fare clic su ReadRobotSwLimits per leggere le informazioni parametri limite esistenti.
Fare clic su «08_MC_ReadActualPosition» per accedere all’interfaccia lettura posizione effettiva. Fare clic su ReadPosition per leggere le informazioni posizione esistenti.
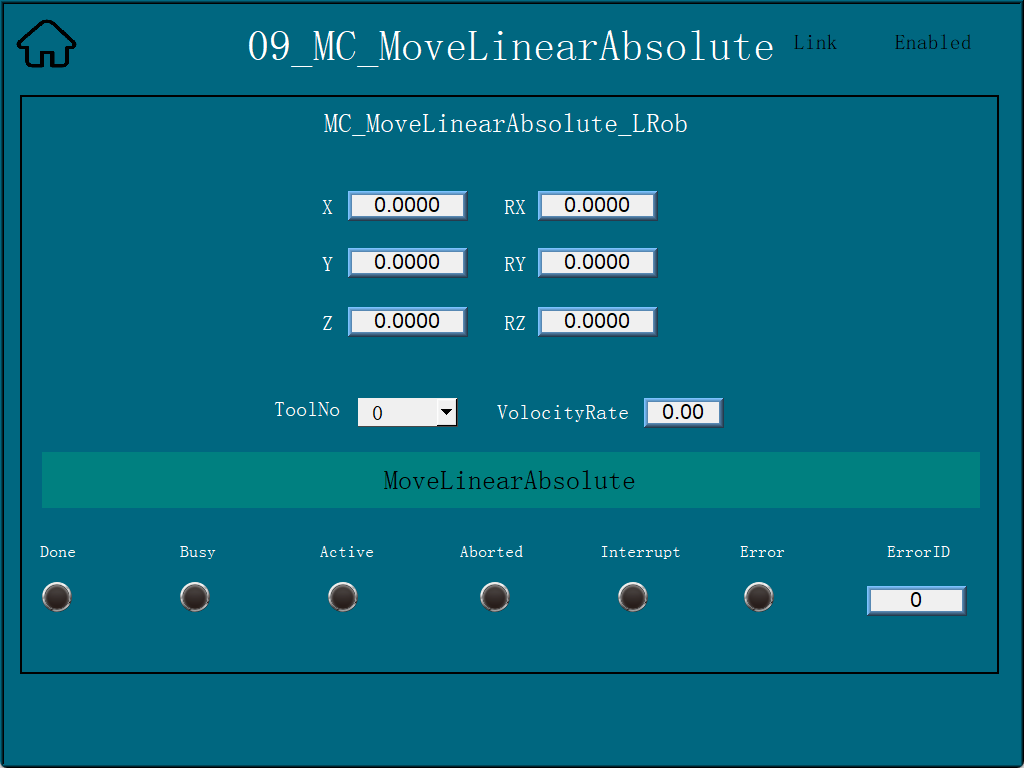
Fare clic su «09_MC_MoveLinearAbsolute» per accedere all’interfaccia movimento lineare. Inserire i parametri di coordinate e fare clic su MoveLinearAbsolute per far muovere il robot linearmente verso la posizione target.
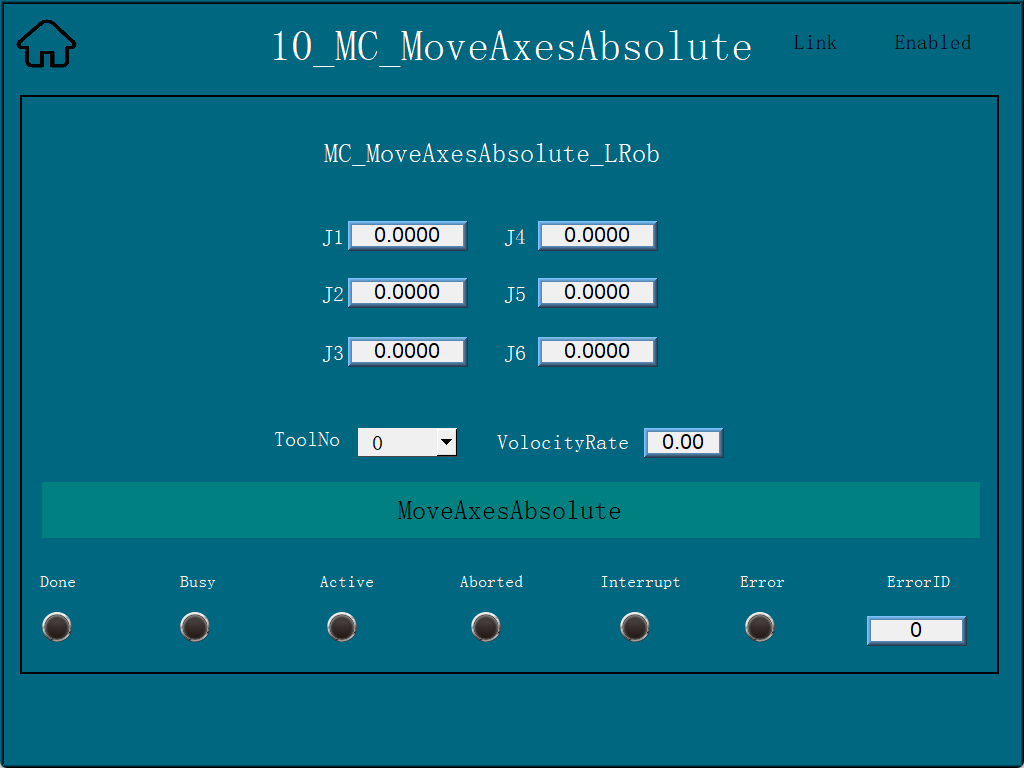
Fare clic su «10_MC_MoveAxesAbsolute» per accedere all’interfaccia movimento coordinate assi. Inserire i parametri di coordinate e fare clic su MoveAxesAbsolute per far muovere il robot verso la posizione target utilizzando le coordinate assi inserite come punto finale.
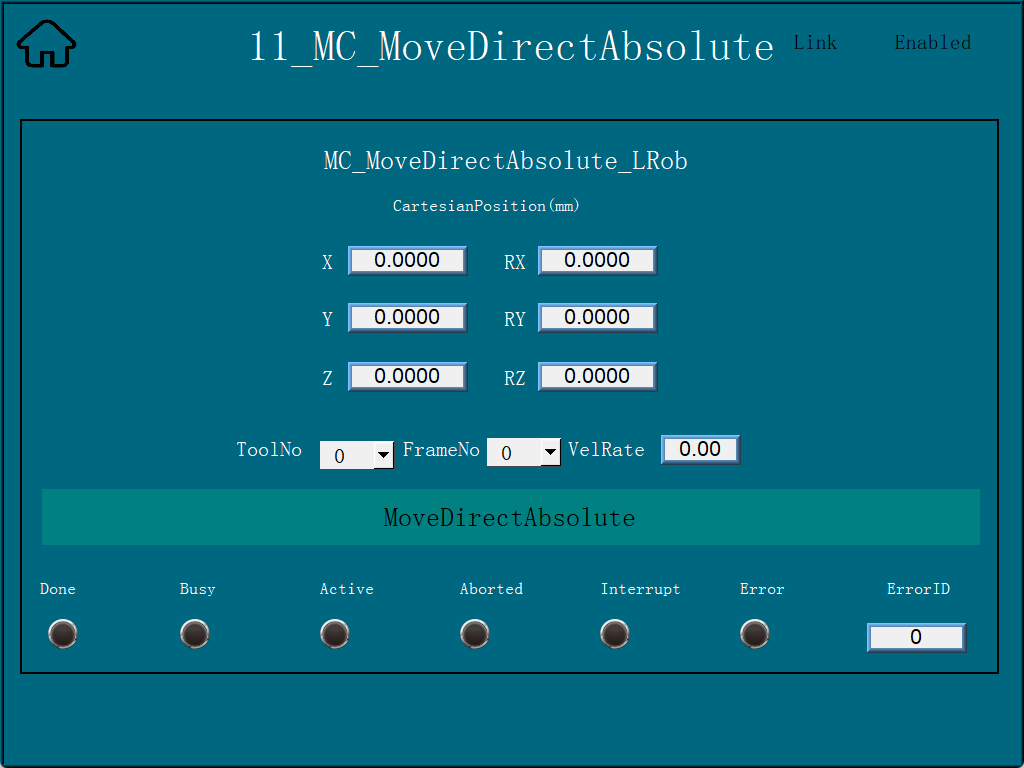
Fare clic su «11_MC_MoveDirectAbsolute» per accedere all’interfaccia movimento diretto. Inserire i parametri di coordinate e fare clic su MoveDirectAbsolute per far muovere il robot direttamente verso la posizione target utilizzando i parametri inseriti come punto finale.
Fare clic su «12_MC_Groups» per accedere all’interfaccia operazione movimento diretto. Qui, fare clic su GroupInterrupt per interrompere il movimento del robot durante lo spostamento, GroupContinue per far continuare il robot verso la posizione target. GroupStop per fermare (terminare) l’azione di movimento in corso. Se si verifica un allarme o un errore durante il processo, fare clic su GroupReset per ripristinare l’errore del robot.

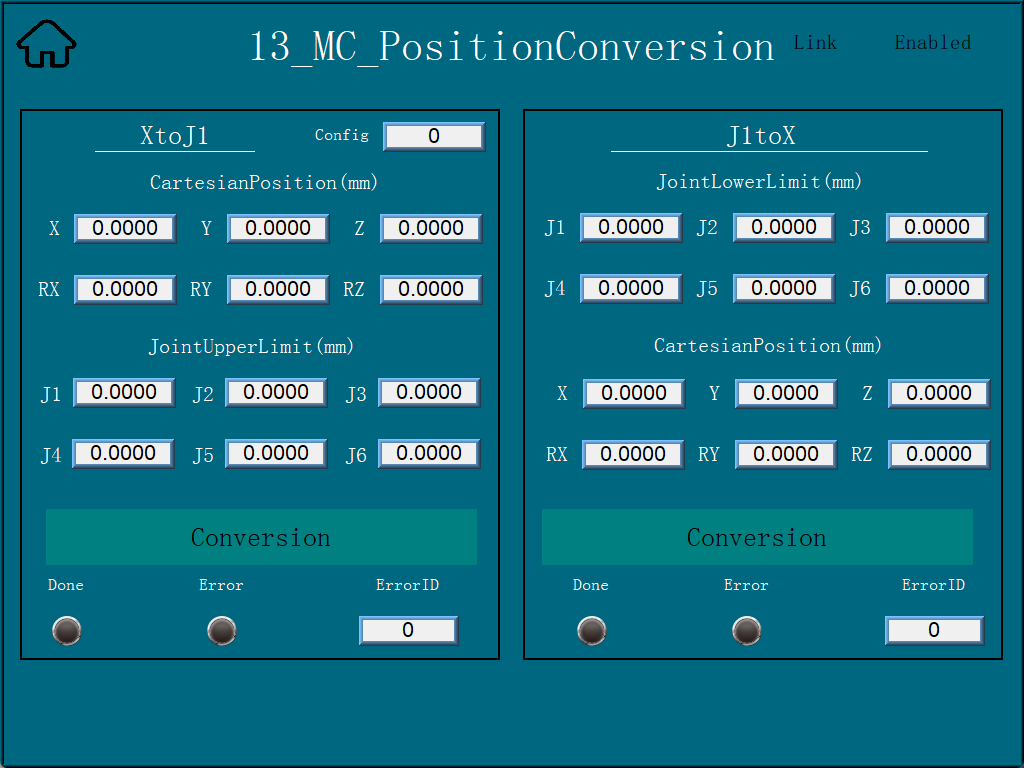
Fare clic su «13_MC_PositionConversion» per accedere all’interfaccia conversione posizione. XtoJ1 può convertire la posa cartesiana in angoli giunto, J1toX può convertire gli angoli giunto in posa cartesiana.
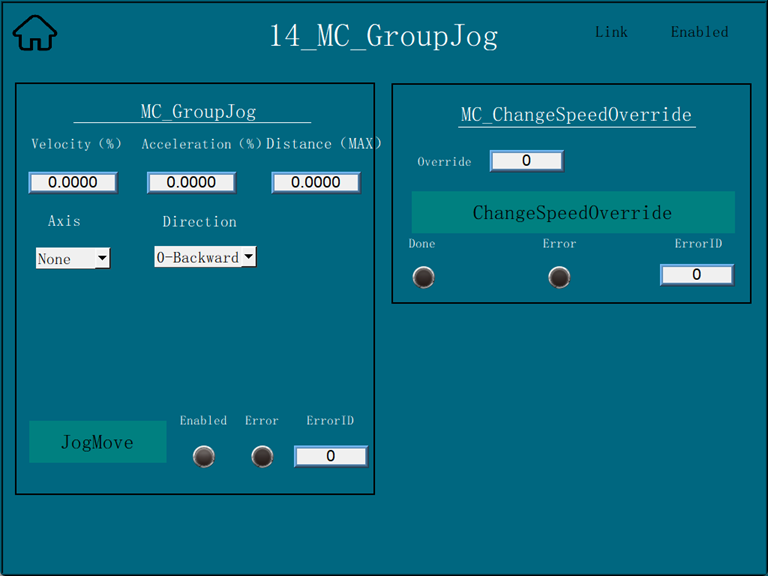
Fare clic su «14_MC_GroupJog» per accedere all’interfaccia jogging del robot. Dopo la configurazione, selezionare l’asse da muovere tramite jog dal menu a discesa degli assi di coordinate, quindi selezionare la direzione di rotazione dell’asse. Fare clic su JogMove per eseguire il jog. A destra, MC_ChangeSpeedOverride può regolare la velocità di movimento del braccio robotico.
18.2.6. Configurazione HMI (Simulazione Profinet)
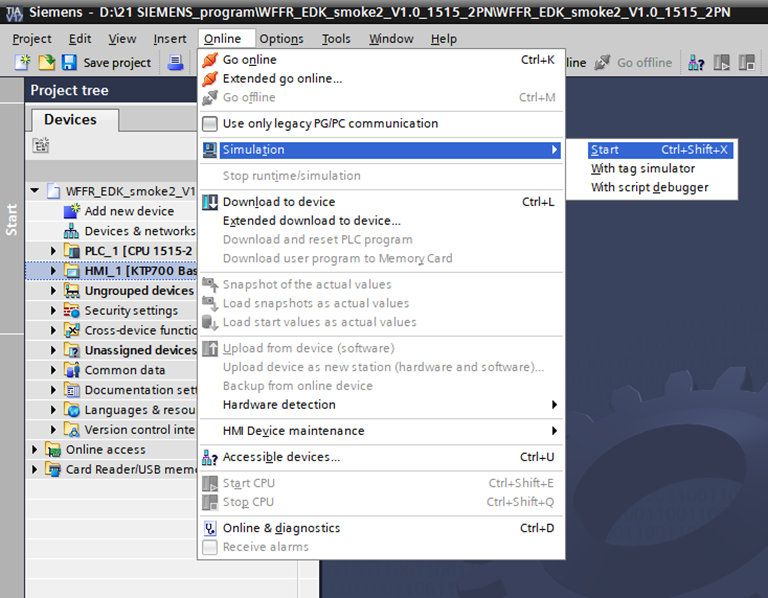
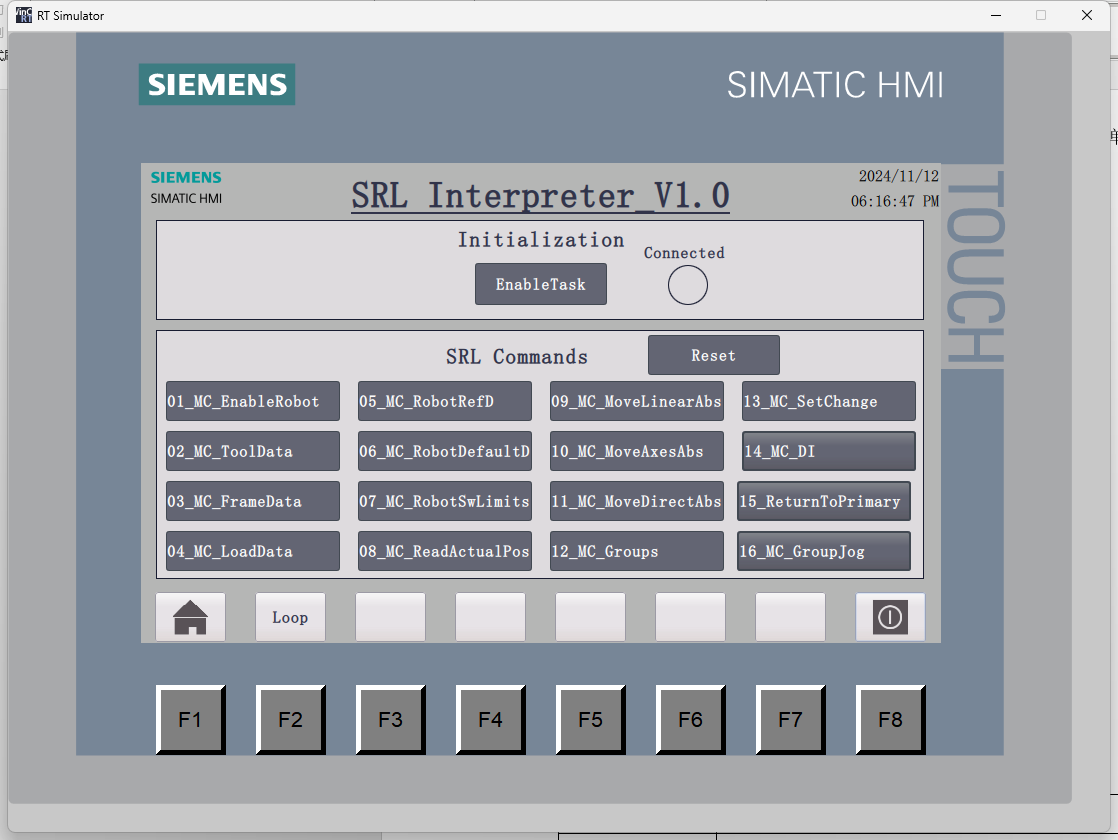
Dopo aver aperto il programma, fare clic per selezionare «HMI_1[ktp700 Basic PN]» nell’albero del progetto, quindi nella barra dei menu fare clic su «Online» -> «Simulazione» -> «Avvia». Attendere la compilazione e l’avvio della simulazione da parte del software.
Dopo la simulazione, le funzioni corrispondono a quelle dello schermo Weintek (CC-Link IEF Basic). Per le impostazioni, fare riferimento al contenuto sopra descritto.
18.3. Spiegazioni sulle Operazioni Relative alla Modalità Slave del Robot
18.3.1. Caricamento Modalità Slave
Step 1: Aprire WebApp, andare a Impostazioni Iniziali -> Periferiche -> Comunicazione Schede -> Configurazione Manuale.
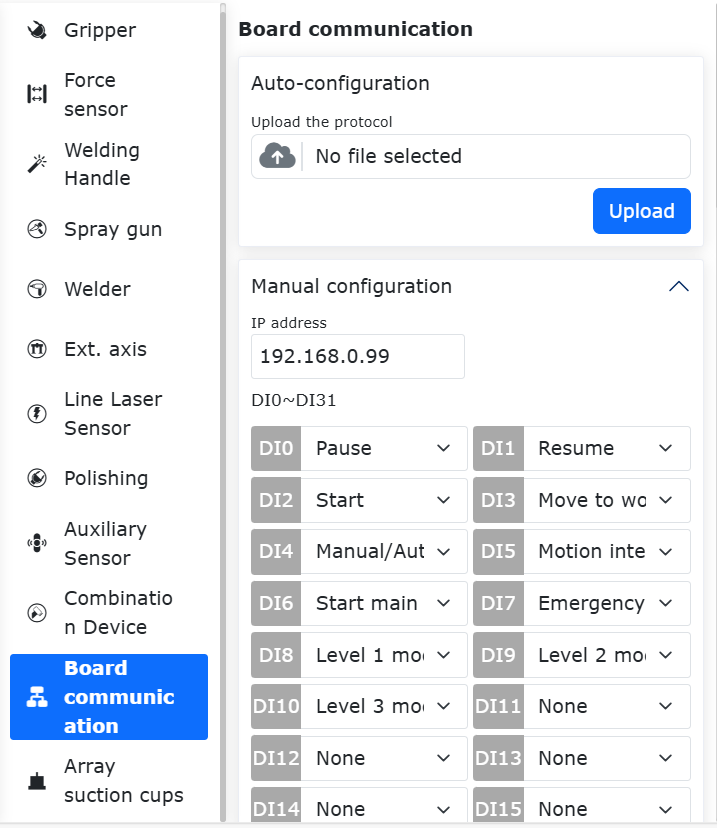
Figura 17.3-1 Configurazione Manuale Comunicazione Schede
Innanzitutto, configurare l’indirizzo IP della scheda FRJ-PCIeN. Se lasciato vuoto, la scheda si avvierà con l’IP predefinito: 192.168.0.100. Attualmente la configurazione IP è applicabile solo ai protocolli EIP e CC-Link IEF Basic. Per il protocollo PN, l’indirizzo IP dello slave viene assegnato dal master PLC durante la scansione dei dispositivi slave.
Nota
Dopo aver modificato l’indirizzo IP nella pagina, è necessario caricare la modalità slave per renderlo effettivo.
Selezionare in sequenza le funzioni di mappatura richieste per DI, DO, AO (vedi Appendice 1). Il significato dei parametri è il seguente:
DI è Controllo Robot: il robot slave accetta segnali di ingresso esterni ed esegue le funzioni mappate;
DO è Uscita Stato Robot: il robot slave restituisce segnali di stato al master;
AO è Feedback Stato Robot: il robot slave restituisce dati di stato al master. AO0~AO15 sono interi con segno (int16), AO16~AO31 sono numeri in virgola mobile a precisione singola (float).
Step 2: Fare clic sul pulsante «Configura» per generare il file lua del protocollo aperto.
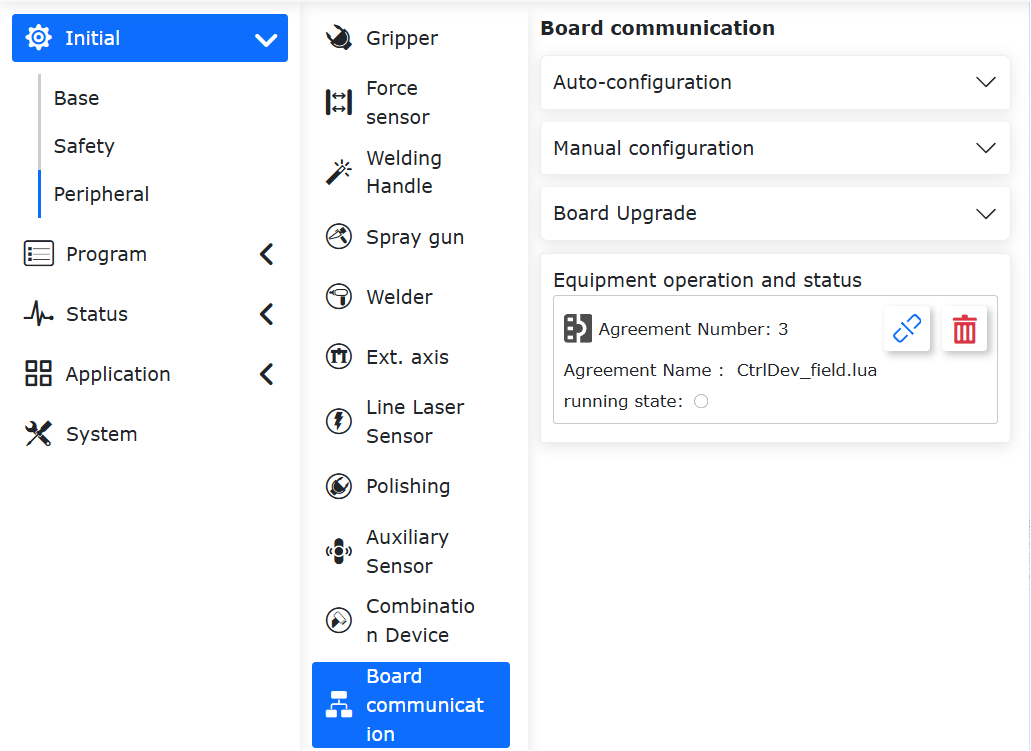
Figura 17.3-2 Operazioni e Stato Dispositivo
Nota
Il file lua del protocollo aperto supporta il download. È possibile importare il file lua del protocollo aperto nell’interfaccia di configurazione automatica.
Esempio di programma generato:
1local id = 3
2local ctrlDI = {0, 0, 0, 0, 0, 0}
3local funcDI = {0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0}
4local DOState = {0, 0, 0, 0, 0, 0, 0, 0}
5local AOState = {0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0}
6-- Avvia il processo di comunicazione della scheda
7LoadFieldBusSlave()
8sleep_ms(8000)
9while(1) do
10 -- Imposta lo stato DO
11 CtrlBoxDO, CtrlBoxCO, CtrlBoxDI, CtrlBoxCI, errState, motionState, moveToOriginState, robotStartDoneState, modeChangeState, programStartStopState, emergencyState, reduceState, collision, enablestate, safetyStop0, safetyStop1, pauseState, interfereState = GetRobotFuncDOState()
12 DOState[1] = CtrlBoxDO
13 DOState[2] = CtrlBoxCO
14 DOState[3] = CtrlBoxDI
15 DOState[4] = CtrlBoxCI
16 local ctrlWord0 = 0
17 ctrlWord0 = SetBitWithIndex(ctrlWord0, 0, errState)
18 ctrlWord0 = SetBitWithIndex(ctrlWord0, 1, motionState)
19 ctrlWord0 = SetBitWithIndex(ctrlWord0, 2, moveToOriginState)
20 ctrlWord0 = SetBitWithIndex(ctrlWord0, 3, robotStartDoneState)
21 ctrlWord0 = SetBitWithIndex(ctrlWord0, 4, modeChangeState)
22 ctrlWord0 = SetBitWithIndex(ctrlWord0, 5, programStartStopState)
23 ctrlWord0 = SetBitWithIndex(ctrlWord0, 6, emergencyState)
24 ctrlWord0 = SetBitWithIndex(ctrlWord0, 7, reduceState)
25 DOState[5] = ctrlWord0
26 local ctrlWord1 = 0
27 ctrlWord1 = SetBitWithIndex(ctrlWord1, 0, collision)
28 ctrlWord1 = SetBitWithIndex(ctrlWord1, 1, enablestate)
29 ctrlWord1 = SetBitWithIndex(ctrlWord1, 2, safetyStop0)
30 ctrlWord1 = SetBitWithIndex(ctrlWord1, 3, safetyStop1)
31 ctrlWord1 = SetBitWithIndex(ctrlWord1, 4, pauseState)
32 ctrlWord1 = SetBitWithIndex(ctrlWord1, 5, interfereState)
33 DOState[6] = ctrlWord1
34 SetFieldBusDOState(DOState)
35
36 -- Imposta lo stato AO
37 mainErrCode, subErrCode, TCPSpeed, axisPos1, axisPos2, axisPos3, axisPos4, axisPos5, axisPos6, jointVelFeedback1, jointVelFeedback2, jointVelFeedback3, jointVelFeedback4, jointVelFeedback5, jointVelFeedback6, jointCurFeedback1, jointCurFeedback2, jointCurFeedback3,jointCurFeedback4,jointCurFeedback5,jointCurFeedback6, jointTorqueFeedback1, jointTorqueFeedback2,jointTorqueFeedback3,jointTorqueFeedback4, jointTorqueFeedback5, jointTorqueFeedback6, cartPosx, cartPosy, cartPosz, cartPosrx, cartPosry, cartPosrz = GetRobotFuncAOState()
38 AOState[1] = mainErrCode
39 AOState[2] = subErrCode
40 AOState[17] = axisPos1
41 AOState[18] = axisPos2
42 AOState[19] = axisPos3
43 AOState[20] = axisPos4
44 AOState[21] = axisPos5
45 AOState[22] = axisPos6
46 AOState[23] = cartPosx
47 AOState[24] = cartPosy
48 AOState[25] = cartPosz
49 AOState[26] = cartPosrx
50 AOState[27] = cartPosry
51 AOState[28] = cartPosrz
52 SetFieldBusAOState(AOState)
53 sleep_ms(10)
54
55 -- Imposta lo stato DI
56 -- Configura la funzione DI e aggiornala in tempo reale
57 ctrlDI[1],ctrlDI[2],ctrlDI[3],ctrlDI[4],ctrlDI[5],ctrlDI[6] = GetFieldBusDIState()
58 funcDI[1] = ctrlDI[1]
59 funcDI[2] = ctrlDI[2]
60 funcDI[3] = GetBitWithIndex(ctrlDI[3], 0)
61 funcDI[4] = GetBitWithIndex(ctrlDI[3], 1)
62 funcDI[5] = GetBitWithIndex(ctrlDI[3], 2)
63 funcDI[6] = GetBitWithIndex(ctrlDI[3], 3)
64 funcDI[7] = GetBitWithIndex(ctrlDI[3], 4)
65 funcDI[8] = GetBitWithIndex(ctrlDI[3], 5)
66 funcDI[9] = GetBitWithIndex(ctrlDI[3], 6)
67 funcDI[10] = GetBitWithIndex(ctrlDI[3], 7)
68 funcDI[11] = GetBitWithIndex(ctrlDI[4], 0)
69 funcDI[12] = GetBitWithIndex(ctrlDI[4], 1)
70 funcDI[13] = GetBitWithIndex(ctrlDI[4], 2)
71 funcDI[14] = GetBitWithIndex(ctrlDI[4], 3)
72 funcDI[15] = GetBitWithIndex(ctrlDI[4], 4)
73 funcDI[16] = GetBitWithIndex(ctrlDI[4], 5)
74 SetRobotFuncDIState(funcDI)
75 local stopFlag = GetOpenLUAStopFlag(id)
76 if(stopFlag ~= 0) then
77 UnloadFieldBusSlave()
78 break
79 end
80 sleep_ms(10)
81end
Step 3: Fare clic sul pulsante Carica per caricare la modalità slave del robot.
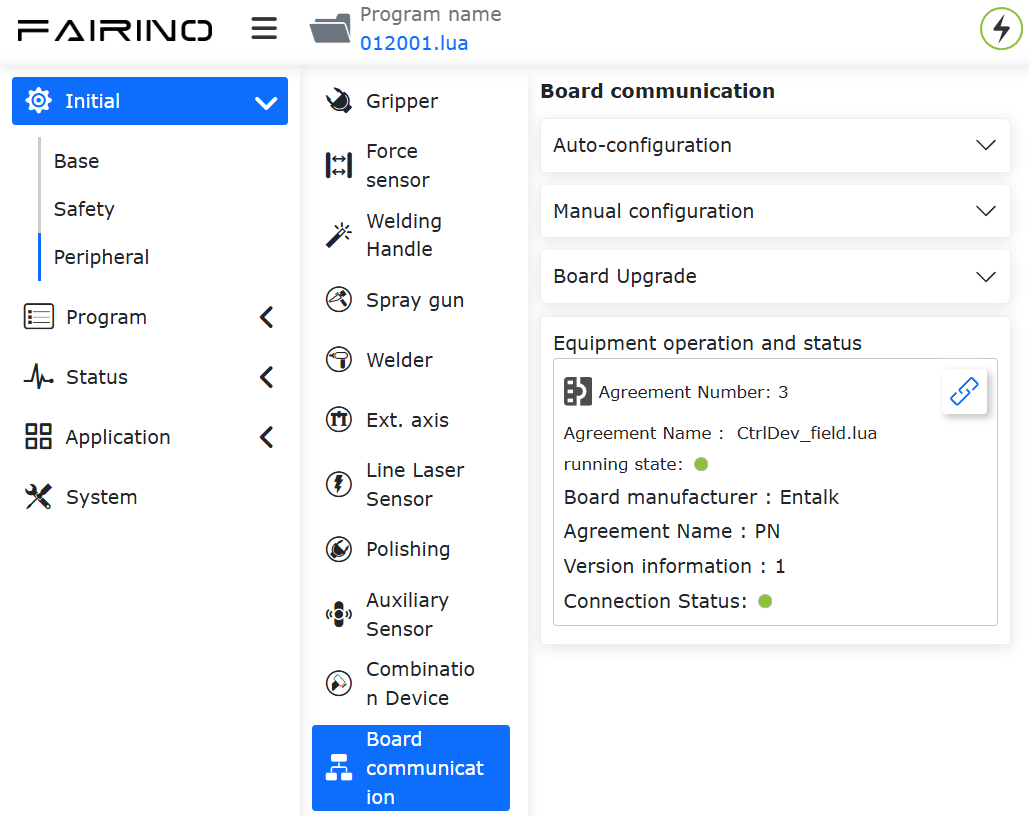
Figura 17.3-3 Caricamento Modalità Slave
Nota
Dopo il caricamento riuscito della modalità slave del robot, è supportata la funzione di avvio automatico. Per utilizzare la modalità remota, rimuovere prima la modalità slave.
Step 4: Fare clic sul pulsante della barra di stato a destra per monitorare le informazioni di interazione DI, DO, AI, AO. Descrizione parametri:
CtrlDO è il valore del segnale di ingresso da parte del dispositivo master per controllare i DO del control cabinet robot;
DI è il valore di ingresso del segnale di controllo dal master esterno;
DO è il valore di uscita del segnale di feedback dal robot slave;
AI è il valore di ingresso dal master esterno, AI0~AI15 sono di tipo int16, AI16~AI31 sono di tipo float;
AO è il valore di uscita dal robot slave, AO0~AO15 sono di tipo int16, AO16~AO31 sono di tipo float.
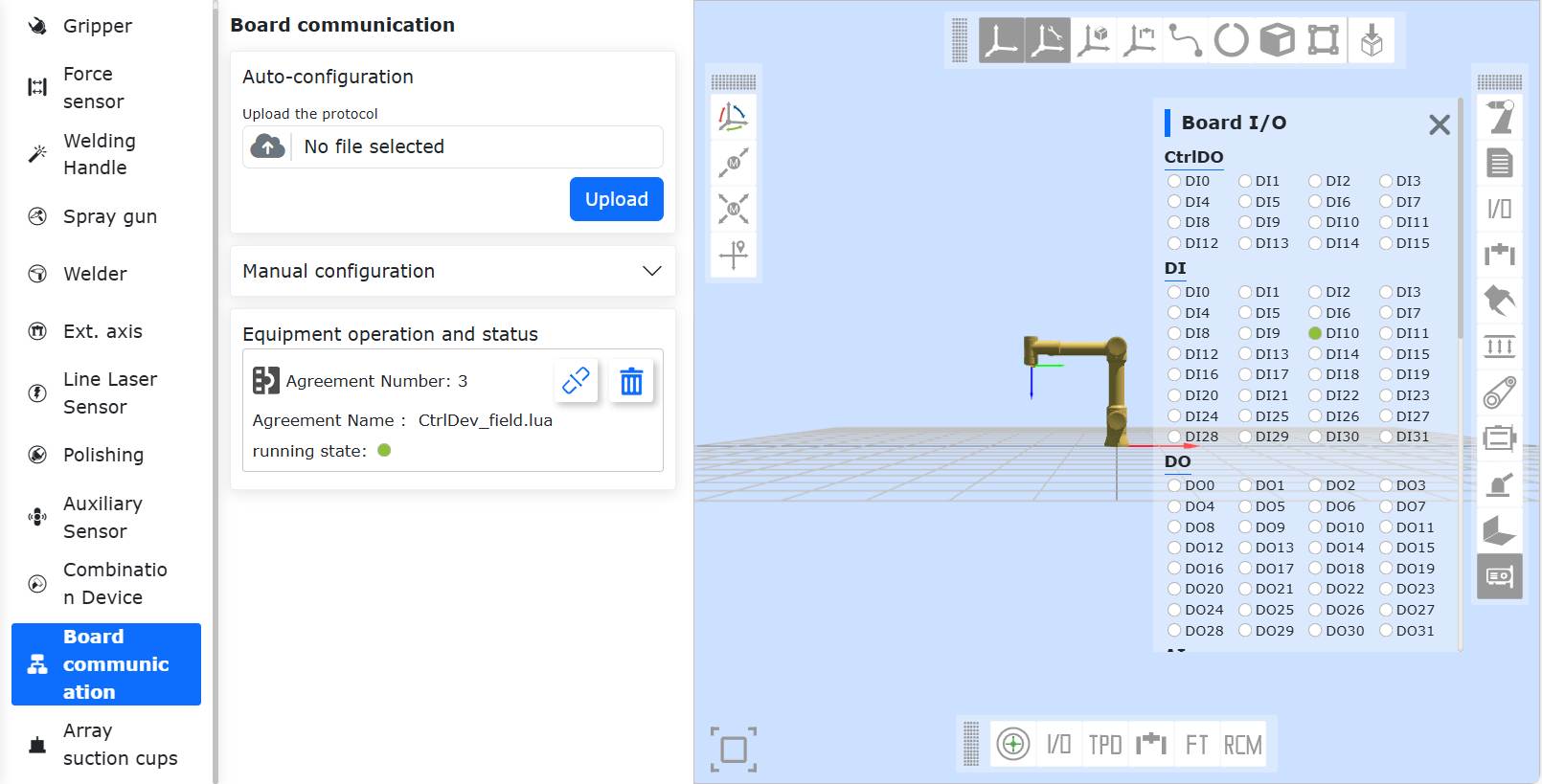
Figura 17.3-4 Informazioni Interazione DI, DO, AI, AO
Step 5: Dopo il caricamento, è possibile generare istruzioni lua per la scheda tramite Insegnamento Programma -> Istruzioni Comunicazione -> Scheda, per implementare l’impostazione di DO, AO slave, l’acquisizione di DI, AI slave, l’attesa di DI, AI slave.
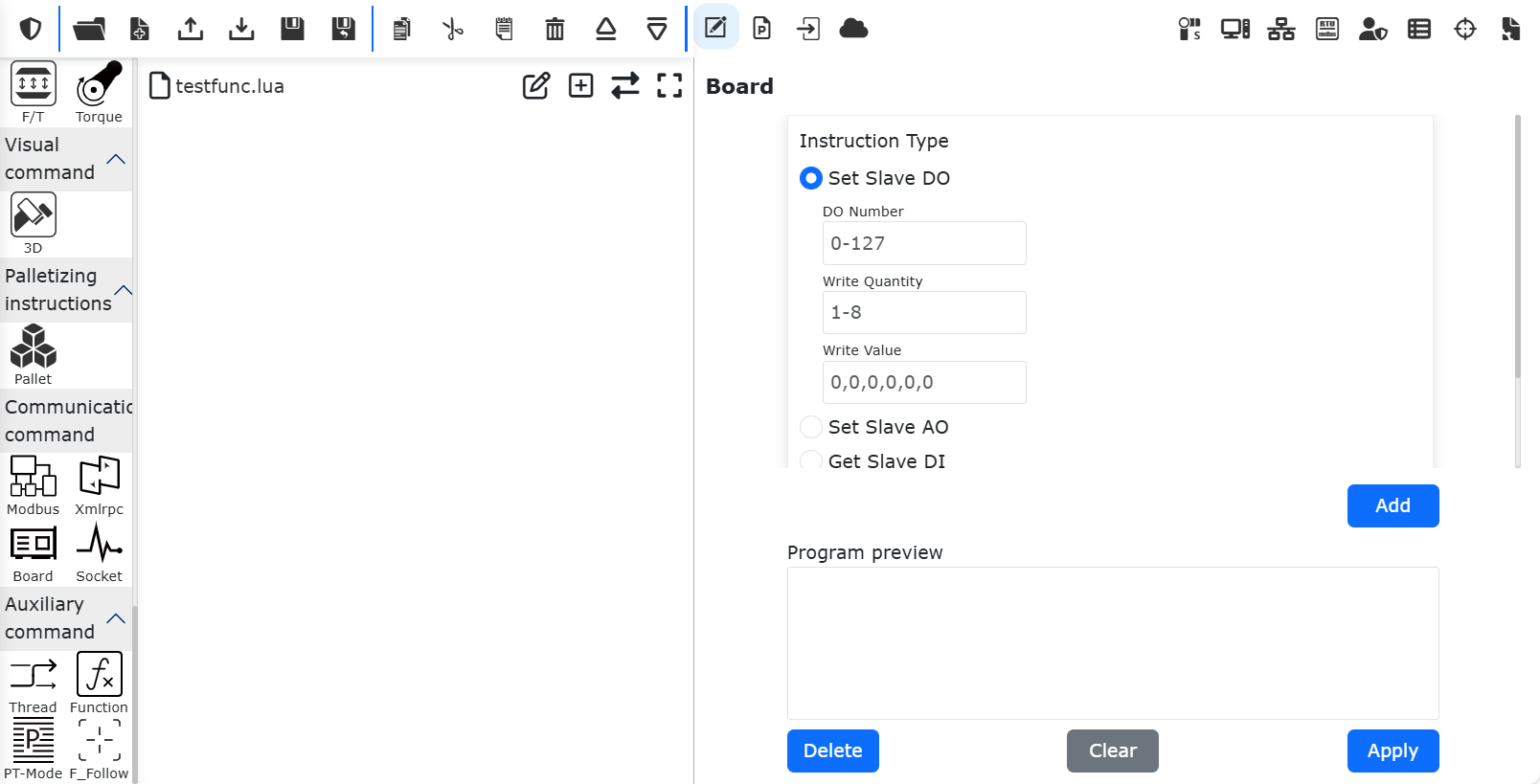
Figura 17.3-5 Generazione Istruzioni Lua Scheda
18.4. Aggiornamento del firmware della scheda e configurazione del ciclo di comunicazione
18.4.1. Scheda FRJ-PCIeN-EIP/CC/PN-RJ-V10
Il ciclo di comunicazione della scheda può essere configurato tramite il computer host. Attualmente è disponibile solo il firmware per il protocollo PN, con futura compatibilità per i protocolli EIP, CC-Link IE Basic e EtherCAT.
Collegare direttamente la porta di rete del PC (sistema Windows 11) alla porta di rete della scheda. Aprire Device Assistant v1.1.0, fare doppio clic su «Ethernet» e fare clic sul pulsante «Aggiorna» in alto a sinistra per scansionare le schede attualmente collegate.
Nell’interfaccia di aggiornamento firmware, caricare la nuova versione del firmware PN e fare clic sul pulsante «Aggiorna». Un messaggio che indica «Aggiornamento Riuscito» apparirà in basso a sinistra una volta stampato.
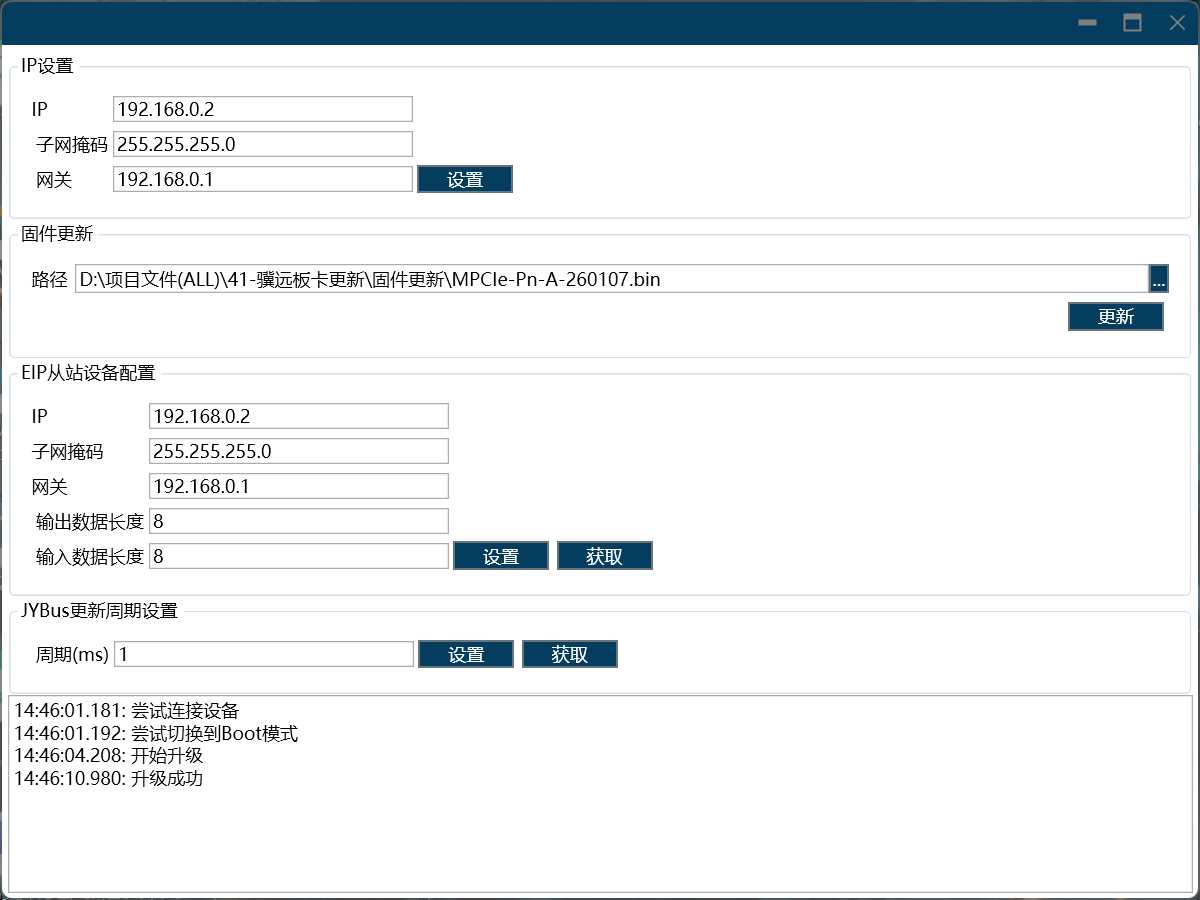
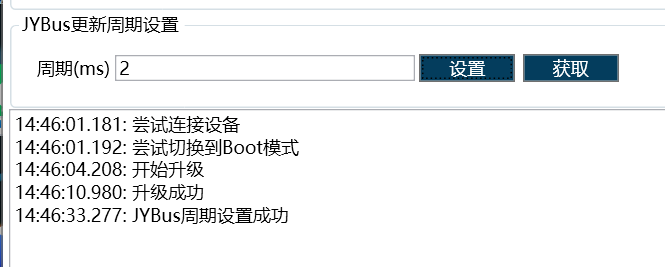
Inserire il ciclo di comunicazione desiderato (supporta 1~100ms) e fare clic sul pulsante «Imposta». Un messaggio che indica «Impostazione Ciclo Riuscita» apparirà in basso a sinistra una volta stampato.
18.4.2. Scheda FRJ-PCIeN-EC/PN/EIP/CC-RJ-V20
Questa scheda supporta l’aggiornamento online. I passaggi sono i seguenti:
Inserire l’URL 192.168.58.2 per accedere all’interfaccia del robot, quindi fare clic su «Impostazioni iniziali» -> «Periferiche» -> «Comunicazione scheda» per ottenere il numero di versione del firmware della scheda FRJ-PCIeN-EC/PN/EIP/CC-RJ-V20. Selezionare il file bin da aggiornare, fare clic su Carica, attendere il completamento dell’aggiornamento del firmware, quindi riavviare il box di controllo.
Nota
Per aggiornare il firmware della scheda FRJ-PCIeN-EC/PN/EIP/CC-RJ-V20, è necessario scaricare il protocollo aperto in esecuzione.
Inserire l’URL 192.168.58.2 per accedere all’interfaccia del robot, quindi fare clic su «Impostazioni iniziali» -> «Periferiche» -> «Comunicazione scheda» per ottenere il ciclo di comunicazione della scheda. Immettere il ciclo di comunicazione desiderato (1~100 ms), fare clic sul pulsante «Configura», attendere il completamento della configurazione, quindi riavviare il box di controllo.
Nota
Per configurare il ciclo di comunicazione della scheda FRJ-PCIeN-EC/PN/EIP/CC-RJ-V20, è necessario scaricare il protocollo aperto in esecuzione.
18.5. Appendice
18.5.1. Lista Istruzioni
Codice Comando |
Descrizione Istruzione |
|---|---|
0x1000 |
Abilitazione Robot |
0x1001 |
Ripristina Tutti gli Errori |
0x1002 |
Arresto Movimento Robot |
0x1003 |
Lettura Posizione Effettiva |
0x1004 |
Impostazione Velocità Robot |
0x1005 |
Ripresa Movimento Robot |
0x1006 |
Pausa Movimento Robot |
0x1007 |
Calcola Posizione Cartesiana da Posizione Giunto |
0x1008 |
Calcola Posizione Giunto da Posizione Cartesiana |
0x2000 |
Scrittura Informazioni Utensile |
0x2001 |
Lettura Informazioni Utensile |
0x2002 |
Scrittura Informazioni Pezzo |
0x2003 |
Lettura Informazioni Pezzo |
0x2004 |
Scrittura Informazioni Carico |
0x2005 |
Lettura Informazioni Carico |
0x2006 |
Scrittura Informazioni Dinamiche Riferimento |
0x2007 |
Lettura Informazioni Dinamiche Riferimento |
0x2008 |
Scrittura Informazioni Dinamiche Predefinite |
0x2009 |
Lettura Informazioni Dinamiche Predefinite |
0x2010 |
Scrittura Informazioni Limiti Software |
0x2011 |
Lettura Informazioni Limiti Software |
0x3000 |
MoveAxes (basato su angoli giunto) |
0x3001 |
MoveLinear |
0x3002 |
MoveDirect (basato su sistema di coordinate cartesiane) |
0x3003 |
Movimento jog |
0x3004 |
Arresto jog |