5. Programmazione Rapida del Robot
5.1. Introduzione Istruzioni di Movimento Semplici
Comando PTP: Cliccare l’icona «Punto a Punto» per accedere all’interfaccia di modifica comando PTP.
È possibile selezionare il punto da raggiungere. L’impostazione del tempo di transizione morbida permette un movimento continuo da questo punto al successivo. È possibile impostare se applicare un offset, scegliendo tra offset basato sul sistema di coordinate base e offset basato sul sistema di coordinate strumento. Verranno visualizzati i campi per impostare gli offset x, y, z, rx, ry, rz. Il percorso specifico PTP è il percorso ottimizzato pianificato automaticamente dal controller di movimento. Cliccando «Aggiungi», «Applica» è possibile salvare questa istruzione.
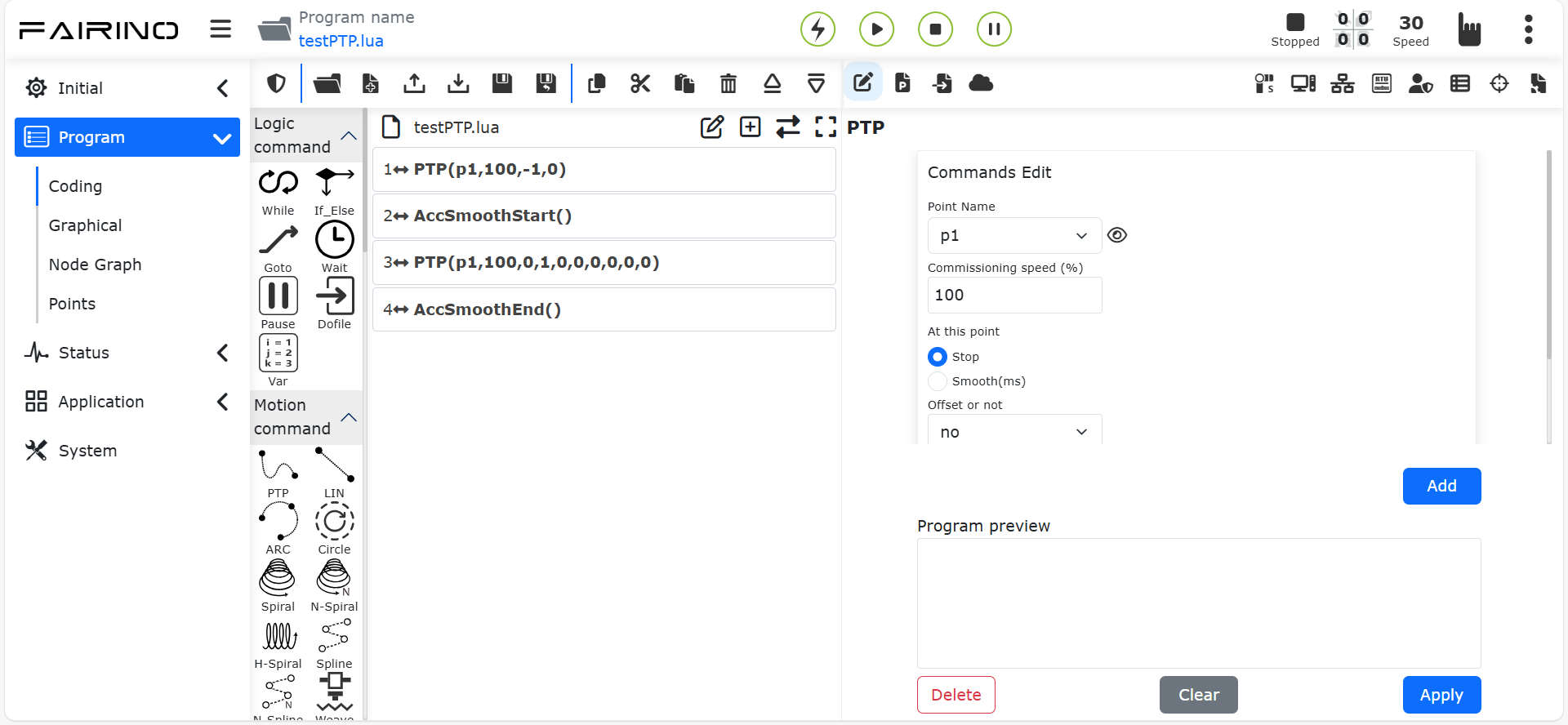
Grafico 5.1‑1 Interfaccia comando PTP
Comando Lin: Cliccare l’icona «Linea» per accedere all’interfaccia di modifica comando Lin.
La funzione di questa istruzione è simile a quella del comando «PTP», ma il percorso per raggiungere il punto con questa istruzione è una linea retta.
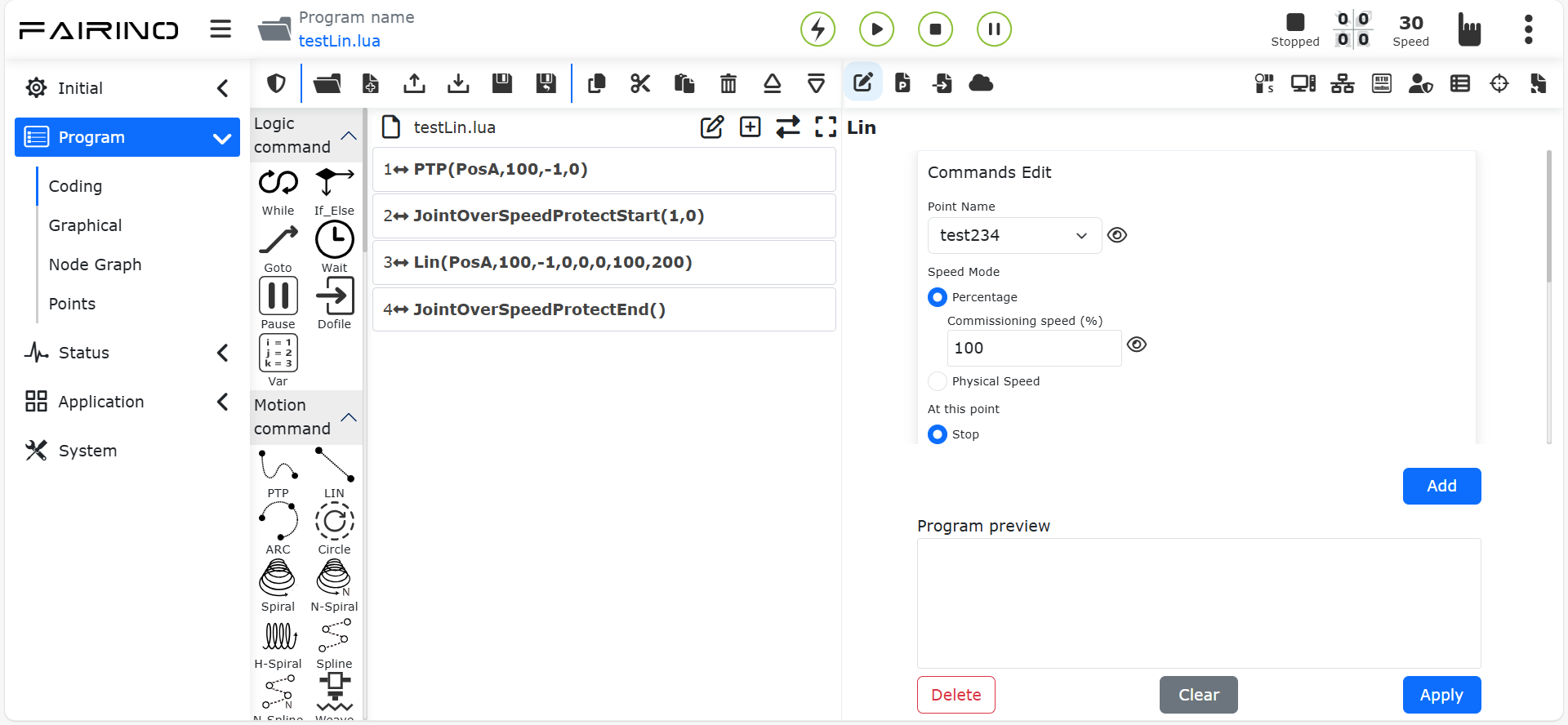
Grafico 5.1‑2 Interfaccia comando Lin
5.2. Operazioni sul File di Programma
Utilizzare la barra degli strumenti nella parte superiore dell’albero del programma per modificare l’albero del programma.
Nota

Nome: Apri
Funzione: Aprire un file di programma utente
Nota

Nome: Nuovo
Funzione: Selezionare un modello per creare un nuovo file di programma
Nota

Nome: Importa
Funzione: Importare un file nella cartella dei programmi utente
Nota

Nome: Esporta
Funzione: Esportare un file di programma utente in un punto locale
Nota

Nome: Salva
Funzione: Salvare il contenuto modificato del file.
Nota

Nome: Salva con nome
Funzione: Rinominare il file e salvarlo nella cartella dei programmi utente o dei modelli di programma
Nota

Nome: Copia
Funzione: Copiare un nodo, consentendone l’uso in altre operazioni (ad esempio: incollarlo in altre posizioni dell’albero del programma)
Nota

Nome: Incolla
Funzione: Consente di incollare un nodo precedentemente tagliato o copiato
Nota

Nome: Taglia
Funzione: Tagliare un nodo, consentendone l’uso in altre operazioni (ad esempio: incollarlo in altre posizioni dell’albero del programma)
Nota

Nome: Elimina
Funzione: Eliminare un nodo dall’albero del programma
Nota

Nome: Sposta su
Funzione: Spostare il nodo verso l’alto
Nota

Nome: Sposta giù
Funzione: Spostare il nodo verso il basso
Nota
Nome: Cambia modalità modifica
Funzione: Passare dalla modalità albero del programma alla modalità di modifica lua e viceversa
5.3. Scrittura ed Esecuzione di un Programma
La parte sinistra è principalmente dedicata all’aggiunta di comandi di programma. Cliccando le icone sopra le parole chiave si accede all’interfaccia dettagliata a destra per l’aggiunta di comandi di programma. Le operazioni per aggiungere comandi di programma al file si dividono principalmente in due tipi:
Aprire l’istruzione correlata e cliccare il pulsante Applica per aggiungere l’istruzione al programma;
Cliccare prima il pulsante «Aggiungi». A questo punto il comando non è salvato nel file di programma, è necessario cliccare «Applica» per salvare il comando nel file.
Il secondo metodo si presenta spesso quando si devono inviare più istruzioni dello stesso tipo. Per questo tipo di comando è stata aggiunta la funzione di pulsante di aggiunta e visualizzazione del contenuto delle istruzioni già aggiunte. Cliccando il pulsante Aggiungi si aggiunge un’istruzione. La sezione delle istruzioni già aggiunte mostra tutte le istruzioni aggiunte. Cliccando «Applica» è possibile salvare le istruzioni aggiunte nel file aperto a destra.
Cliccando il pulsante Avvia, si esegue il programma; cliccando il pulsante Ferma, si interrompe l’esecuzione del programma; cliccando il pulsante Pausa/Riprendi, si mette in pausa/riprende il programma. Durante l’esecuzione del programma, il nodo del programma attualmente in esecuzione viene evidenziato in verde.
In modalità manuale, cliccando la prima icona a destra di un nodo si può far eseguire al robot solo quell’istruzione; la seconda icona serve per modificare il contenuto di quel nodo.
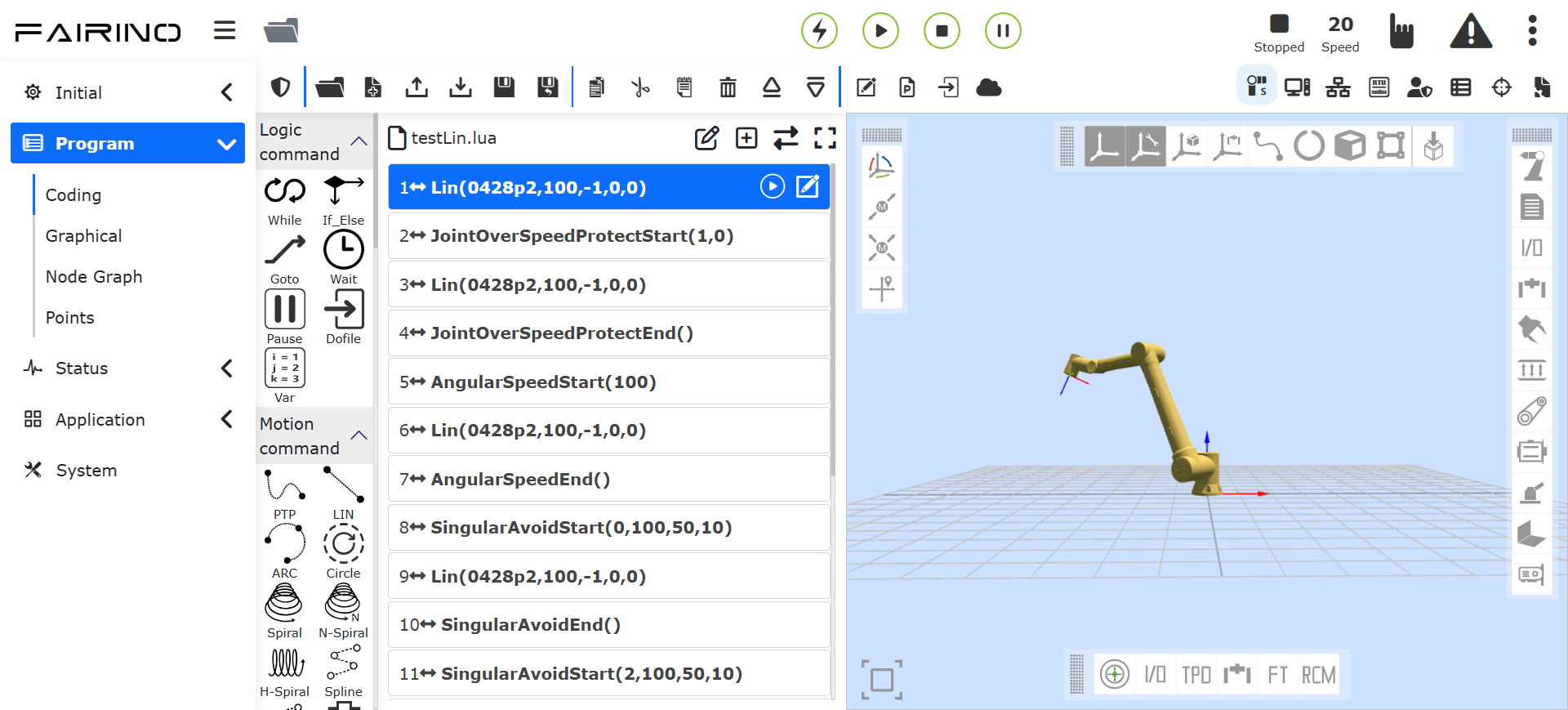
Grafico 5.3‑1 Interfaccia albero del programma