2. Accesso al WebApp
2.1. Accesso all’interfaccia WebApp
Accendere il cabinet di controllo e collegare il cavo di rete al PC;
Sul PC, aprire il browser Chrome e visitare l’URL 192.168.58.2;
Inserire nome utente e password, quindi fare clic su «Login» per accedere al WebApp.
Il nome utente predefinito è admin e la password è 123.
Figura 2.1‑1 Interfaccia di accesso
2.2. Conoscere rapidamente l’interfaccia WebApp
Dopo l’accesso, il sistema entra nell“«Interfaccia iniziale», che comprende principalmente:
Logo FAIRINO;
Pulsante per ridurre/espandere la barra dei menu;
Barra dei menu;
Area di controllo del robot;
Area di stato del robot;
Robot di simulazione 3D — Operazioni sullo scenario 3D;
Robot di simulazione 3D — Operazioni sul corpo del robot;
Funzioni accessorie del robot;
Stato del robot e delle sue funzioni accessorie.
Come illustrato nello schema dell’interfaccia iniziale del sistema riportato di seguito:
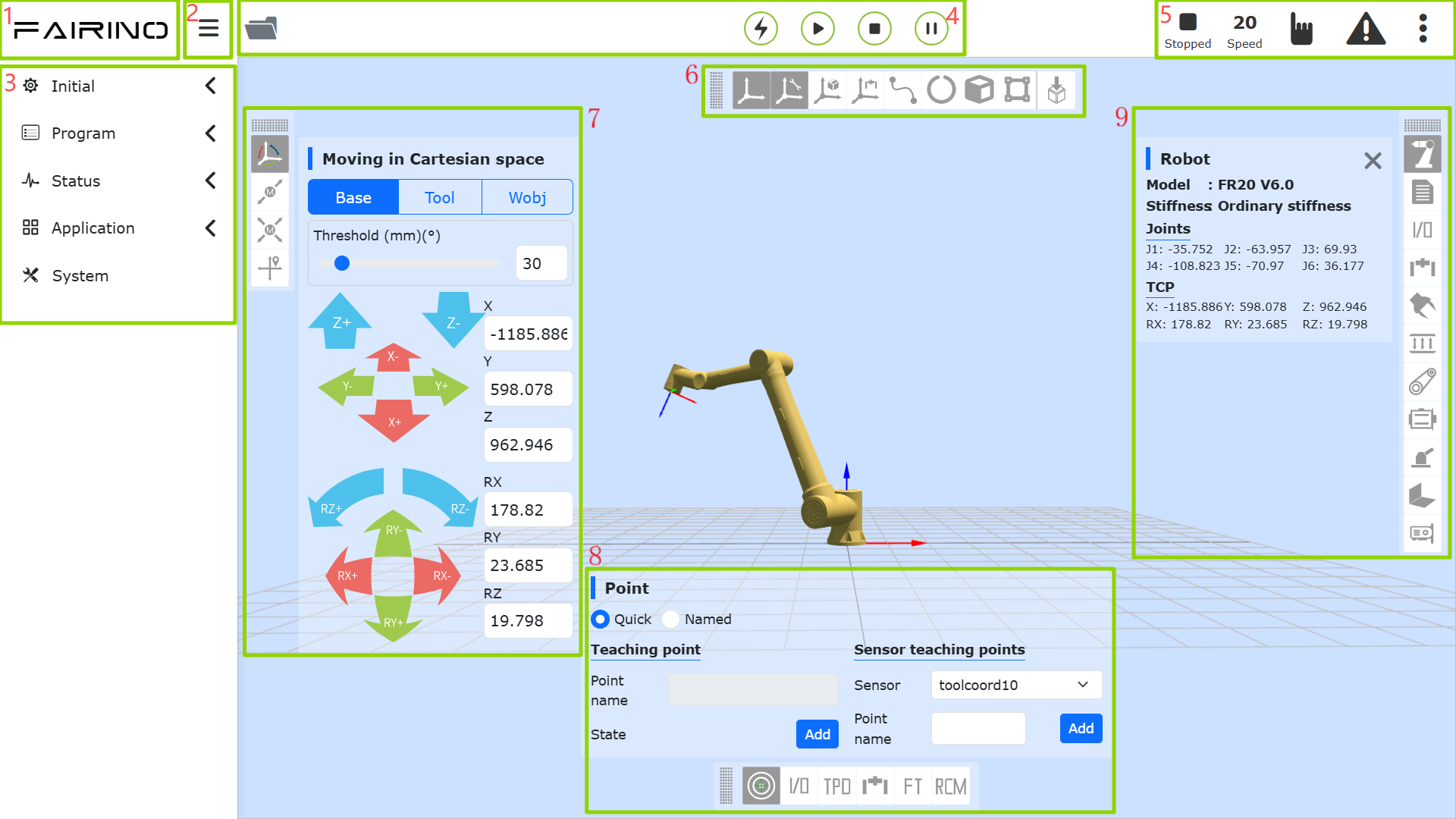
Figura 2.2‑1 Schema dell’interfaccia iniziale del sistema
2.2.1. Area di controllo
Nota

Nome: Pulsante Apri programma di insegnamento
Funzione: Apre il programma di insegnamento per la programmazione a codice, la programmazione grafica e la programmazione a nodi.
Nota

Nome: Pulsante di Abilitazione
Funzione: Abilita il robot.
Nota

Nome: Pulsante di Avvio
Funzione: Carica e avvia l’esecuzione del programma di insegnamento.
Nota

Nome: Pulsante di Arresto
Funzione: Interrompe l’esecuzione del programma di insegnamento corrente.
Nota

Nome: Pulsante Sospendi/Riprendi
Funzione: Sospende e riprende il programma di insegnamento corrente.
Importante
Il comando di pausa si trova alla fine del programma e non può essere valutato.
2.2.2. Barra di stato
Nota

Nome: Stato del Robot
Funzione: Stopped - Arrestato, Running - In esecuzione, Pause - In pausa, Drag - In trascinamento.
Nota

Nome: Percentuale velocità di esecuzione
Funzione: Velocità di esecuzione del robot nella modalità corrente.
Nota

Nome: Modalità Automatica
Funzione: Modalità di funzionamento automatico del robot. Quando si attiva la regolazione della velocità globale nel passaggio da manuale ad automatico e si specifica una velocità, la velocità globale viene automaticamente regolata alla velocità specificata.
Nota

Nome: Modalità Manuale
Funzione: Modalità manuale del robot per eseguire operazioni di insegnamento.
Nota

Nome: Stato di funzionamento normale del robot
Funzione: Il robot è attualmente in funzionamento normale.
Nota

Nome: Stato di errore di funzionamento del robot
Funzione: Si è verificato un errore durante il funzionamento corrente del robot.
Nota

Nome: Pulsante Comprimi/Espandi stato robot
Funzione: Comprime/espande i contenuti relativi a: sistema di coordinate utensile, sistema di coordinate pezzo, sistema di coordinate assi estesi, carico, stato di trascinamento del robot, modalità locale/remota, stato di connessione del robot, modalità BOOT e informazioni account.
Nota

Nome: Numero sistema di coordinate utensile
Funzione: Visualizza il numero del sistema di coordinate utensile attualmente applicato.
Nota

Nome: Numero sistema di coordinate pezzo
Funzione: Visualizza il numero del sistema di coordinate pezzo attualmente applicato.
Nota

Nome: Numero sistema di coordinate assi estesi
Funzione: Visualizza il numero del sistema di coordinate assi estesi attualmente applicato.
Nota

Nome: Carico
Funzione: Visualizza il peso del carico applicato corrente e le coordinate del centro di massa X, Y, Z.
Nota

Nome: Stato di trascinamento del robot
Funzione: Il robot è attualmente trascinabile.
Nota

Nome: Stato di trascinamento del robot
Funzione: Il robot non è attualmente trascinabile.
Nota

Nome: Modalità Locale del robot
Funzione: Il robot è attualmente controllato tramite il cabinet di controllo.
Nota

Nome: Modalità Remota del robot
Funzione: Il robot può essere controllato attualmente solo tramite PLC.
Nota

Nome: Stato di Connessione
Funzione: Robot connesso.
Nota
Nome: Stato di Non Connesso
Funzione: Robot non connesso.
Nota

Nome: Informazioni Account
Funzione: Visualizza nome utente, autorizzazioni e consente il logout dell’utente.